
|
|
|
Главная страница Проектирование станочных приспособлений [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [ 18 ] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] можно уменьшить размеры и вес гидроцилиндров; 3) возможность бесступенчатого регулирования сил зажима и скоростей движения поршня со штоком; 4) высокая равномерность перемещения поршня вследствие несжимаемости масла. К недостаткам гидравлических приводов относятся: сложность гидроустановки и выделение площади для ее размещения; утечки масла, ухудшающие работу гидропривода. В конце 1974 г. введены новые стандарты на гидроцилиндры для станочных приспособлений: одностороннего действия со сплошным и полым штоком (ГОСТ 19897-74 и 19898-74); двустороннего действия (ГОСТ 19899-74) и двустороннего действия укороченные (ГОСТ 19900-74) на номинальные давления [10 МПа (100 кгс/см)]. Эти ГОСТы устанавливают конструкции и основные размеры гидроцилпндров. § V.3. Пневмогидравлические приводы Пневмогидравлические приводы применяют для перемещения зажимных устройств приспособлений. Они состоят из преобразователя давления, который соединен с гидроцилиндрами приспособлений, и необходимой аппаратуры. По виду работы пневмогидроприводы бывают с преобразователями давления прямого действия и с преобразователями давления последовательного действия. Пневмогидравлические приводы питаются сжатым воздухом из цеховой сети через пневматическую аппаратуру под давлением 0,4-0,6 МПа (4-6 кгс/см) при давлении масла в гидравлической части привода 6-10 МПа (60-ЮОкгс/см). Высокое давление масла в пневмогидроприводе создается ппевмо-гидравлическими преобразователями прямого или последовательного действия, превращающими давление сжатого воздуха и высокое давление масла. Пневмогидравлические приводы, сочетающие в себе простоту конструкции пневматических с преимуществами гидравлических приводов, обеспечивают быстроту перемещения зажимных устройств, небольшие габариты конструкции, создание больших сил залаша, сравнительно небольшую стоимость. Пневмогидроприводы применяют для зажима деталей в одно-, многоместных и многопозиционных приспособлениях (в серийном производстве). Пневмогидравлический привод с преобразователем давления прямого действия. Принципиальная схема работы такого привода (рнс. V.26) основана на непосредственном преобразовании давления сжатого воздуха в высокое давление масла. Пневмогидропривод состоит из пневмоцилиндра 2 односторон» него действия с поршнем 4 и гидравлического цилиндра / одностороннего действия с поршнем 6. Сл<атый воздух поступает из воздушной сети через распределительный кран в бесштоковую по-пость 3 пневмоцилиндра 2 и перемещает поршень 4 со штоком 5 влево. Шток 5 давит на масло, которое перемещает ч гидроцнлинд-ре I поршень 6 со штоком 7 влево. При этом шток 7 через проме- жуточные звенья перемещает зажимные устройства приспособления при зажиме детали. При разлиме детали поршни 4, 6 со штоками, пружинами перемещаются вправо. При равновесии привода, т. е. давления между воздухом и маслом в пневмогидравлическом преобразователе (без учета трения), откуда давление масла в гидроцилиндре 1 [Па (кгс/см)] где рв -давление воздуха в пневмоцилиндре. Па; Di-диаметр поршня пневмоцилиндра, см; d - диаметр шток-плунжера, см. 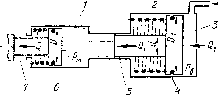 сети Рис. V.26. Схема пневмогидропривода с пневмогидравлическим преобразователем давления прямого действия Отношение i = pM/pB = Di/d является коэффициентом усиления давления; принимают /= 16-21. Сила на штоке рабочего гидроцилиндра (без учета сопротивления возвратной пружины, но с учетом механического КПД) Q = (jtD2/4)A,ri. Подставим вместо давления рм его значение, тогда Q==p,iDlld) {пи;4)г]. Обозначим p,iлDl4) = Q,. Подставим в равенство значение силы Qi и, произведя преобразования, получим: QiinDl/4) р,г]; Q=Q,{D!d)r], где Qi - сила па штоке пневмоцилиндра, Н (кгс); D - диаметр поршня гидроцилиндра, см; ti~0,84-0,85 - КПД. Величину хода штока пневмоцилиндра определим из формулы L{nd)=l{nDl4), откуда Ll{Ddf. С учетом Tio, определяющего потери масла на утечку, L = l{Dldf{nX), где L - ход штока пневмоцилиндра, см; / - ход штока рабочего гидроцилпндра, см; п - число рабочих гидроцилиндров приспособ-! лений, обслуживаемых приводов; г]о = 0,95 - объемный КПД привода. Из выражения Q = PM(nD2/4) определяем диаметр рабочего гидроцилиндра (без учета КПД) (см): D=yAQXnp). После преобразования получим D=\,\3YQIp. Диаметр штока пневмоцилиндра (см) rf = D/(l,75-2,5). Из формулы определяем диаметр пневмоцилиндра (см) Dx = dy p,,;{p,vi). Приняв давление сжатого воздуха рв = 0,4 МПа (4 кгс/см) и КПД привода Т1 = 0,8, подставим в формулу и, преобразовав ее, получим А = 0,56а?1/ Объем сжатого воздуха (см), расходуемого за один цикл зажима детали в приспособлении, У = {я:А) D\L, где D\ - диаметр поршня пневмоцилиндра, см; L - длина хода поршня со штоком пневмоцилиндра, см. На рис. V.27, а дана схема пневмогидравлического привода с преобразователем давления прямого действия. Сжатый воздух через распределительный кран поступает в бесштоковую полость пневмоцилиндра 4 диаметром Di. Шток пневмоцилиндра 4 диаметром d является плунжером гидроцилиндра 1 и при движении вниз перемещает масло по трубопроводу 8 в бесштоковую полость гидроцилиндра 7 с поршнем диаметром D. При этом поршень со штоком, перемещаясь в гидроцилиндре 7 вверх, зажимает деталь в приспособлении. После обработки детали отработанный воздух из пневмоцилиндра 4 через распределительный кран выпускается в атмосферу и поршни со штоками в пневмоцилиндре 4 и гидроцилиндре 7 пружинами 3 \1 6 отводятся в исходное положение. Резервуар 2 слул<ит для компенсации утечек масла в системе. Управление устройством производится трехходовым краном 5. На рис. V.27, б дана схема пневмогидравлического привода с преобразователем давления прямого действия, в котором обратный ход поршней 4 \\7 пневмо- и гидроцилиндров производится сл<атым воздухом. При этом уменьшается длина цилиндров, так как на штоках нет прулин, и повышается скорость срабатывания цилиндров. Схемы, изображенные на рис. V.27, а, б, аналогичны. Управление работой устройства производится четырехходовым краном 10. Компенсация утечек масла происходит из резервуара 1 через обратный клапан 9. 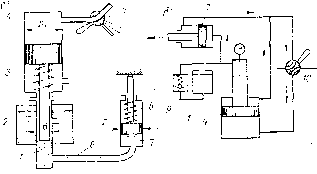 Рис. V.27. Схемы пневмогидравлических приводов с преобразователями давления прямого действия Общим недостатком пневмогидравлических приводов с преобразователями давления прямого действия, изображенных на рис. V.27, а, б, является сравнительно большой ход поршня со штоком в пневмоцилиндре, чтобы получить необходимую величину рабочего хода штока гидроцилиндра, особенно при обслуживании нескольких гидроцилиндров приспособлений, и большой расход сжатого воздуха на холостой ход штока гидроцилиндра. Органический недостаток пневмогидравлических приводов заключается во вспенивании масла вследствие попадания в него сжатого воздуха. Пневмогидравлический привод с преобразователями давления последовательного действия. Приводы с преобразователями давления последовательного действия показаны на рис. V.28, а, б. Они обеспечивают большее давление масла и больший ход рабочих поршней гидроцилиндров по сравнению с преобразователями давления прямого действия. Преобразователь последовательного действия отличается от преобразователя прямого действия наличием в нем полости низкого давления масла. Преобразователь последовательного действия работает по следующему замкнутому циклу: 1) при низком давлении масла поршни со штоками перемешаются в гидроцилиндрах приспособлений, и штоки через промежуточные звенья предварительно зажимают детали; 2) при высоком давлении масла поршни со штоками гидроцилиндров, перемешаясь через промежуточные звенья, окончательно залшмают детали; 3) после обработки деталей механизм высокого давления переключается на разжим деталей. Поршни со штоками гидроцилиндров приспособлений под действием пружин перемешаются в исходное положение. На рис. V.28, а дана схема пневмогидравлического привода с преобразователем давления последовательного действия более совершенной конструкции. Сжатый воздух через распределительный четырехходовый кран / по трубопроводам поступает в левую полость пневмоцилиндра 4 п в нил<нюга полость пневмокамеры 2 с диафрагмой 3 из маслостойкой резины. Во время перемещения поршня со штоком 5 в пневмоцилиндре 4 вправо и выгибании диафрагмы 3 вверх масло пз полости 6 выжимается в левую полость силового цилиндра 8 и перемещает поршень 10 со штоком 9 вправо. При этом шток 9 через промежуточные звенья передвигает зажимы и деталь предварительно зажимается. Когда шток 5 перекроет полость 6, то он вытеснит масло из малой полости 7 в левую полость цилиндра 8; перемещение поршня 10 со штоком 9 вправо замедлится, осевая сила на штоке 9 увеличится, поэтому он через промежуточные звенья приведет в движение зажимные устройства и произойдет окончательный залим детали. При разжиме детали распределительный кран / переключается и сжатый воздух по трубопроводам подается в правые полости цилиндров 8 я 4, а штокн 9 и 5 с поршнями переместятся в исходное левое положение. На рис. V.28, б дана схема пневмогидравлического привода с преобразователем давления последовательного действия и автоматическим клапаном. Автоматический клапан переключает подачу сжатого воздуха из полости низкого давления масла в рабочую 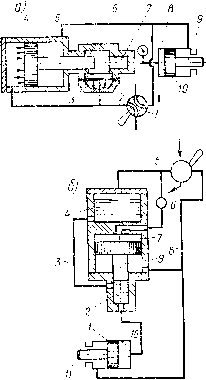 Рис. V.28. Схемы пневмогидравличе-ских приводов с преобразователями давления последовательного действия полость пневмоцилиндра при повышении давления масла в полости низкого давления до установленной величины. После переключения рукоятки четырехходового распределительного крана 5 сжатый воздух из магистрали, пройдя через кран, поступает в верхнюю полость резервуара и вытесняет из него масло, которое по трубопроводу 3 идет в цилиндр 2. Из цилиндра масло по трубопроводу подается в правую полость цилиндра 10 и передвигает поршень / со штоком влево, а шток через промежуточные звенья перемещает зажимы и предварительно зажимает деталь. В результате повышения давления масла в правой полости цилиндра 10 автоматически открывается клапан 6 последовательного действия. При этом сжатый воздух из крана 5 через клапан 6 поступает в верхнюю полость цилиндра 7 и перемещает поршень со штоком 9 вниз. Шток 9, опускаясь, перекрывает воздушное отверстие в цилиндре 2 и вытесняет масло из него по трубопроводу в правую полость цилиндра 10. Давление масла в цилиндре 10 повышается, поршень / со штоком перемещается влево, а шток через промелуточные звенья приводит в движение зажимы и окончательно зажимает деталь. При переключении крана 5 сжатый воздух по трубопроводу 8 поступает в штоковые полости 10 я 7 я перемещает поршни со штоками в исходное положение. Недостатком пневмогидравлического привода с преобразователем давления последовательного действия по сравнению с преобразователями прямого действия является более сложная конструкция и большая утечка масла, а также вспенивание и окисление масла при непосредственном соприкосповении с воздухом. § V.4. Механогидравлические, электромеханические, механические центробежные и вакуумные приводы Механогидравлические приводы. В приспособлениях, требующих больших сил зал<има детали, применяют ручные механогидравлические приводы, которые состоят из ручного винтового зажима и гидравлического цилиндра (рис. V.29). Во время поворота рукоятки 1 винт 2 через плунжер 8 вытесняет масло из резервуара 3 в нижнюю полость цилиндра 4. При этом поршень 7 со штоком 5 перемещается вверх и шток через промежуточные звенья зажимает деталь. После обработки детали, вращая рукоятку /, отводят винт 2 вправо. Возвратная пружина 6 перемещает шток с поршнем вниз, и деталь разжимается. Сила на штоке гидроцилиндра механогидравлического привода [Н (кгс)] г, PL cptg(a-l-<f) d2 где P - сила, прикладываемая рабочим к рукоятке винта, Н (кгс); L - расстояние от точки прилоления силы до оси винта, см; Гср - средний радиус резьбы винта, см; a?»2°30-v-3°30 -угол подъема [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [ 18 ] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] 0.0089 |