
|
|
|
Главная страница Программы проектирования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [ 79 ] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100]
Рис. 9.9 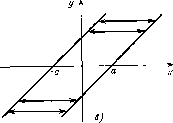 характеристиками. Однако наличие в системе неоднозначных и разрывных характеристик может вызвать серьезные трудности и привести к заметному снижению эффективности моделирования. Поэтому имеет смысл разработать для таких блоков специальные расчетные модели, ориентированные на использование совместно с численными методами интегрирования. В настоящем параграфе предложены расчетные модели некоторых наиболее типичных неоднозначных и разрывных характеристик. В качестве моментов дискретизации при построении расчетных формул будем использовать моменты вычисления правых частей. Так, при использовании двухстадийного метода Рунге - Кутта на каждый шаг интегрирования приходится два момента дискретизации. Рассмотренные здесь неоднозначные характеристики приведены на рис. 9.9. Определим выход неоднозначного блока в некоторый момент дискретизации, как функцию от его входа в тот же момент и выхода в предыдущий момент: уг = 1{щ, г/,-1). Тогда расчетные формулы для неоднозначных блоков будут следующие: двухпозиционное реле (рис. 9.9,а) У1 = bsgn щ, \щ\> а, трехпозиционное реле (рис. 9.9,6) О, «,!<а. csgnwj, «i> нелинейность типа «люфт» (рис. 9.9,в) «;-а, yi-i<Ui-a, щ + а, (/;-!> щ + а, У1 = Особые трудности возникают при цифровом моделировании разрывных характеристик, включенных в контур обратной связи 71инамического блока. Здесь приведены модели, обычно используемые при аналоговом моделировании нагрузки с сухим трением (рис. 9.10,а) и динамического блока с упором (рис. 9.11,а). Попытки использовать эти модели при цифровом моделировании часто приводят к неудачам, поскольку при совпадении выходного сигнала с точкой разрыва характеристики возникает скользящий режим, в результате шаг интегрирования начинает дробиться и решение практически останавливается. Для эффективного моделирования этих характеристик следует использовать логические условия, в зависимости от которых формируется выходной сигнал. Рассмотрим влияние на динамическую нагрузку сухого трения (рис. 9.10,а). Особенностью этой характеристики является то, что если выходной сигнал становится нулевым, а входной не превышает по модулю момент трения, то выход остается равным нулю. Физически входом такого блока является сила, а выходом - скорость. При цифровом моделировании могут возникнуть три ситуации. с Начало 1Е интеграрования Ml-г ti-t  Рис. 9.10 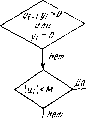 (Номец J Рис. 9.11 Начало 1 Шаг интегрирования У /* ha. 1. Выходной сигнал не изменяет знак на интервале {ti-i, ti), тогда момент трения остается постоянным на этом интервале и для расчета очередного значения Уг используется обычный шаг (стадия) интегрирования. 2. Выходной сигнал изменяет знак на интервале {ti-u ti), а входной сигнал превышает по модулю момент трения (рис. 9.10,6). В момент времени t* переменная Z изменяется скачком на вели- 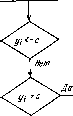 Коней, чину 2М и выходная переменная терпит разрыв производной. При моделировании следует определить момент времени затем произвести пересчет на интервале {t*, /,+1) с учетом изменения знака момента трения. 3. Выходной сигнал изменяет знак на интервале {ti-x, ti), а входной сигнал не превышает по модулю момент трения. Тогда следует принять г/г = 0. Алгоритм моделирования нагрузки с сухим трением на одном шаге дискретизации представлен на рис. 9.10,6. Для определенности здесь использован неявный метод Эйлера, однако может быть применен и любой другой метод интегрирования. При моделировании динамического блока с упором (рис. 9.11,а) следует фиксировать значение выходной переменной в моменты, когда она пытается выйти за ограничения. Алгоритм моделирования динамического блока с упором на одном шаге дискретизации представлен на рис. 9.11,6. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [ 79 ] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] 0.0133 |
||||||||||||||||||||||