
|
|
|
Главная страница Программы проектирования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [ 60 ] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] Программа FILK Назначение: моделирование уравнений движения объекта и фильтра Кал- мана - Бьюси. Параметры: вектор состояния системы, вектор управления, вектор случайных воздействий, матрица динамических параметров системы, матрица коэффициентов усиления управляющих сигналов системы, матрица коэффициентов уоилеиня случайных воздействий, вектор выходных координат, вектор помех при измерениях, • матрица измерений, матрица коэффициентов усиления фильтра. Используемые подпрограммы: RKE - решение системы обыкновенных дифференциальных уравнений методом Рунге -Кутта; ANORM - датчик случайных чисел с нормальным распределением, нулевым математическим ожиданием и единичной днспероией; PLOT - печать графиков. А В С Y V Н К Н,Й,н рад 200- 0,07 - 100 - 0,035 - 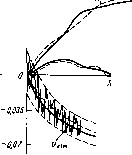 Рис. 8.3 В результате выполнения программы FILK получим реакцию системы на воздействие случайного вектора w (рис. 8.3). Моделироваине показывает, что даже в том случае, когда измеряется лишь одна координата б(0, фильтр дает точные оценки всех координат, максимальные ошибки не превышают 10%. 8.2. ОЦЕНИВАНИЕ ВСЕХ КООРДИНАТ СИСТЕМЫ ПРИ ОТСУТСТВИИ ШУМОВ НАБЛЮДЕНИЯ В предыдущем разделе рассмотрена задача оценивания вектора состояния системы при наличии шумов в измерениях. Однако шумы в измерениях часто практически отсутствуют. Это приводит к тому, что корреляционная матрица ошибок наблюдения R(/) будет вырожденной. Обратная же матрица R~(0 входит как в дифференциальное уравнение Риккати (8.23), так и в вы- ражение для матрицы коэффициентов усиления фильтра (8.19). Поэтому для наблюдений, не содержащих белых шумов, фильтр Калмана - Бьюси в его первоначальной форме уже неприменим. В этом случае одним из возможных способов восстановить вектор состояния является создание модели, в которой все ее переменные доступны измерению. Основные трудности этого способа состоят в том, что необходимо точно знать динамические параметры системы, при этом начальные условия в модели и системе должны совпадать. Кроме того, искажения входных сигналов, воздействующих на систему, не всегда могут быть введены в модель. Другой способ основан на дифференцировании доступных измерению координат некоторое число раз и получении недостающих координат как линейных комбинаций производных. Однако и в этом случае ошибки неизбежны из-за отсутствия хороших дифференцирующих устройств и сильной чувствительности к шумам. Ниже рассмотрим метод восстановления всех компонентов вектора состояния, который был развит Калманом в работе [34]. Пусть линейная наблюдаемая система описывается уравнениями x{t)=\{t)x{t)+B{t)u{t), x{to)=Xo; (8.29) y{t)=C{t)x(t), (8.30) где X(О-«-мерный вектор состояния системы; и( --мерный вектор управления; у() -т-мерный вектор выходных координат; А(), В() и С() -матрицы размера пХп, пХг, тХп соответственно. Если матрица C[t) не вырождена, то вектор состояния может быть легко найден из выражения х(/)=С-1(0у(0- . (8.31) В противном случае вектор состояния можно определить с помощью линейной наблюдаемой системы (фильтра), описываемой векторным дифференциальным уравнением z(0 = D(0z(0-fE(0u(0-fF(0y(0. z(/o)=Zo. (8.32) где z(0-«-мерный вектор состояния фильтра: D{t), £(/) и F(О-матрицы размера яХ«, «Хг, пХт соответственно. Для этой системы векторы u{t) и y{t) являются входными воздействиями. Предположим, что параметры фильтра можно подобрать такие, что z{t)=lx{t), (8.33) где Т - постоянная невырожденная матрица. Определим условия, которым должны удовлетворять матрицы D(/), Е(/) и F(/) фильтра (8.32). Для этого умножим обе части уравнения (8.29) слева на матрицу Т, а равенство (8.33), продиф- ференцировав по времени, подставим в уравнение (8.32). Тогда, используя соотношение (8.30), получаем: Тх (О ==ТА (t) x (О +ТВ (t) и (О, (8.34) Tx(0 = D(OTx(0+F(OC(Ox(0 + E(Ou(0. (8.35) Из равенств (8.34) и (8.35) следует T\{t)-D{t)T=F(t)C{t); (8.36) Е(0 = ТВ(0. (8.37) Если матрицы А(/) и D{t) не имеют общих собственных значений, то при постоянных матрицах А (О, D(0. С (О и F{t) уравнение (8.36) будет иметь единственное решение относительно Т. Этот результат получен в [45]. Вычтем уравнение (8.34) из (8.32) с учетом равенств (8.36) и (8.37). В результате получим линейное однородное дифференциальное уравнение относительно переменной z(t)-Tx{t): z-Tx=D(t)[z{t)-Tx(t)], (8.38) которое имеет хорошо известное решение z(t)-x{t) = Ф{t, /o)[z(o)-Tx(/o)]. (8.39) где Ф {t, to) - фундаментальная матрица, удовлетворяющая уравнению Ф(А о) = 0(ОФ(/, to), Ф{to, to) = l. (8.40) Из уравнения (8.40) следует, что матрицу D(/) необходимо выбирать такой, чтобы действительные части ее собственных значений были строго отрицательными. Тогда переходный процесс, вызванный ошибкой установки начальных условий в наблюдаемой системе и фильтре, будет, как правило, быстро затухать, что позволит такой фильтр считать хорошим. Для упрощения вычислений положим Т=1, где I - единичная матрица. Тогда из (8.36) и (8.37) получим D(0 = A(0-F(OC(0; (8.41) Е(0 = В(0. (8.42) При этом уравнение фильтра примет вид z(0 = [{t)-F{t)C(t)]z(t)+Щt)Vi(t)+F{t)C(t)x(t), (8.43) который может быть построен в соответствии со структурной схемой на рис. 8.4. Это устройство оценки вектора состояния является фильтром Калмана - Бьюси с известным входным сигналом u{t). Коэффициент усиления фильтра F{t) следует подбирать так, чтобы фундаментальная матрица в (8.39) быстро убывала до нуля. Недостаток рассмотренного метода состоит в том, что фильтр оценивает все переменные состояния, хотя некоторые из них (по крайней мере одна) уже наблюдаемы, а некоторые могут не представлять интереса [73]. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [ 60 ] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] 0.0113 |