
|
|
|
Главная страница Программы проектирования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [ 42 ] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] приводит к оптимальному значению c* = limc*+. При этом 6=-P~{cS Г)v(c Т), v(c T)=lg{t, c)dt; g(/, сО = т1(, c)Vti( сО + Рф(/, cOz(/, c»)c R (/, = T]- cO V Tl (/, c») + рф if, C) r it. c»). (6.20) В соответствии с принятыми обозначениями (6.8) здесь ф(, c)=Wt, c)c+z{t, с«), W{t, c) = Hri{i, с);z{t, с) == Нх( с). .(6.21) Полученные соотношения позволяют построить алгоритм определения оптимальных значений параметров синтезируемой системы. 1. Интегрирование дифференциального уравнения замкнутой системы х( с«) = (A + bc«H)x(i, с»), х(0, с«) =Хо. 2. Интегрирование матричного дифференциального уравнения для функций чувствительности т)( c«) = (A+bc«fH)T)(i, c»)+bx(i, с»)Н т)(0,с«)=0. 3. Интегрирование выражений V(c t)=g(!t, с«), v(c 0)=0; Р(с«, i)=K(t, с), Р(с\ 0)=0, где вектор-функция g и матрица R вычисляются по i(6.20), .(6.21). 4. Интегрирование выражения u (cO = c« Hx (/, c; J (c 0) = 0. 5. Выполнить сравнение: если t-7<:0, продолжить интегрирование, перейти к п. 1; если t-ГО, окончить интегрирование, перейти к п. 6. 6. Вычислить новое приближение с*+=с«-Р-(с, T)y(c, Т). 7. Напечатать результаты, s, с«, /(с«, Т)..... 8. Проверить признак окончания оптимизации: если /(С, Т) - -/(€«+, Г)>е, повторить цикл оптимизации, перейти к п. 9; если J{c\ Г)-/(с»+1, Т)е, счет окончен. 9. Восстановить начальные условия х(0, с«)=хо, Ti(0, с«)=0, у(с\ 0)=0; Р(с», 0) =0, /(с», 0)=0. 10. Передать управление на п. 1 для повторения цикла оптимизации. ."i-fiq 129 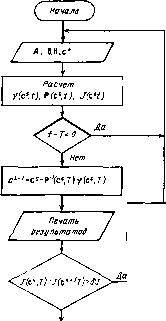 Восстанодить начальные условия Конец Схема алгоритма приведена на рис. 6.1. В одном цикле выполняются предписания 1 ... 4, в результате вычисляются все величины, необходимые для формирования линейного векторного уравнения относительно поправки 6 Интегрирование выполняется до момента времени t = T. После этого вычисляется очередное приближение с«+ согласно (6.19), печатаются результаты счета и проверяется признак окончания оптимизации. Если разность /(с«, 7)--/(€«+, Г) меньше некоторого заданного значения, характеризующего требуемую степень приближения /(с«)->-/(с*), то вычисления прекращаются. Если требуемая точность не достигнута, восстанавливаются начальные условия, и цикл оптимизации повторяется. Данные о размерностях векторов и матриц, входящих в расчетные соотнощения алгоритма: А=(пХп), Ь=(пХ1), с=(йХ1), Н= (Хп); х=(пХ1), z=(feXl), л=(Хй), Р=(ЙХ); v=(Xl), (р=(ЛХ1), Ч=(АХй). В представленном алгоритме процесс оптимизации заканчивается, если минимизируемый функционал /(с«) при очередном приближении практически остается постоянным. В качестве признака окончания оптимизаций можно использовать также неравенство 16«1Р<8с, где Ее - малая величина. В этом случае последовательные приближения прекращаются, если поправки 6« становятся малыми. Целесообразность использования того или иного признака (или обоих одновременно) может быть установлена в зависимости от особенностей конкретного объекта. Это выполняется в результате математического моделирования. При построении алгоритма предполагалось, что управляемая система устойчива. В таком случае процесс оптимизации можно начинать при нулевом значении с = 0. Если собственное движение системы неустойчиво, то вычислительный процесс может оказаться расходящимся. ОБЕСПЕЧЕНИЕ СХОДИМОСТИ ВЫЧИСЛИТЕЛЬНОГО ПРОЦЕССА Выбор начальных приближений в нтерационных численных схемах всегда сопряжен с известными затруднениями. Здесь мы рассмотрим способ организации вычислительного процесса, при- Рис. 6.1 менение которого позволяет провести оптимизацию проектируемой системы при начальном значении вектора искомых параметров €" = 0. Этот способ основан на последовательной минимизации функционалов (и) = f*" (х- (О Vx (О + (0) dt, Т,<Т,<Т,<..., на увеличивающихся интервалах [О, Гц] (х=1, 2, ...). В этом случае вычислительный процесс организуется следующим образом. На первом интервале [О, Ti] в алгоритме оптимизации принимается c° = Q. При таких исходных данных отыскивается минимум Ji(u). Пусть при s = si для вектора 6* выполняется условие 6*11*<ес, что свидетельствует о достижении заданной степени приближения к экстремуму Ji{u). Обозначим через с« найденное значение вектора параметров, которое соответствует этому экстремуму. На следующем интервале [О, Гг] минимизация функционала /2(«) выполняется при начальном значении с° = ск Назначенная окрестность экстремума будет достигнута при некотором s = = S2; пусть ей соответствует вектор сЧ Он принимается в качестве начального {с° = с) на третьем интервале [О, Гз] минимизации функционала /з(") и т. д. Этот процесс последовательной минимизации продолжается до тех пор, пока верхний предел интегрирования станет равным Г. Нет необходимости доказывать, что последовательность С, с««, ... стремится к оптимальному значению с*. В качестве признака окончания процесса оптимизации можно использовать неравенство 1/(сь)-/(с*- )1<е, где е - малая величина. Именно для такого признака на рис. 6.2 представлена схема организации вычислений. Алгоритм минимизации J, строится по схеме на рис. 6.1. При каждом интервале T осуществляется поиск такого вектора c, который соответствует заданной е-окрестности локального минимума интеграла /ц. После этого верхний предел интегрирования увеличивается на АГ, и цикл минимизации повторяется при новом начальном значении c = c. Такой процесс продолжается до тех пор, пока е не достигнет окрестности глобального минимума. Вычислительный процесс начинается при с"-О и некотором значении Гь задаваемом в массиве исходных данных. Верхний предел интегрирования Г в функционале J(u) определяется в алгоритме косвенно, с помощью признака окончания вычислений. Чтобы показать эффективность изложенного приема обеспечения сходимости процесса параметрической оптимизации, приведем результаты математического моделирования. Для уравнения (6.1) управляемой системы принимаем следующие значения:
5* 13! [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [ 42 ] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] 0.0118 |