
|
|
|
Главная страница Теория автономных инверторов [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [ 28 ] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] Частотное регулирование параллельных и последовательных инверторов Рабочая частота инвертора может изменяться с тем, чтобы регулировать напряжение на нагрузке как в параллельном, так и в последовательном инверторе. В параллельном инверторе это совершенно аналогично рассмотренному выше методу изменения фазового угла всей цепи переменного тока. В последовательном инверторе, как это рассмотрено в гл. 3, выходное напряжение изменяется, когда рабочая частота инвертора изменяется относительно резонансной частоты инверторной цепи. Вероятно, наиболее целесообразным способом изменения этого соотношения является изменение рабочей частоты, хотя также возможно использовать насыщающиеся реакторы для изменения резонансной частоты цепи. Конечно, частотное регулирование применимо только тогда, когда выходная частота может не быть стабильной и оно наиболее подходяще для тех применений, в которых требуется лишь небольшое регулирование напряжения. Для тех случаев, когда требуется глубокое регулирование при больших нагрузках, установленная мощность элементов, обеспечивающих необходимое регулирование, становится, как правило, чрезмерной. Широтное регулирование напряжения Однофазная схема. Превосходный метод регулирования напряжения в инверторе представляет собой использование техники импульсного регулирования Л. 6-1]. На рис. 6-1 показаны два основных вида инверторных схем, в которых можно выполнить широтное регулирование напряжения. Цепи коммутации тиристоров не показаны. В схеме рис. 6-1,а при максимальном выходном напряжении Т1 и Т2 управляются таким образом, что точка а присоединяется поперемеино к положительной шине источника тока в один полупериод и к отрицательной шине -в другой полупериод. Напряжение на нагрузке имеет прямоугольную формус амплитудой Еа12. Уменьшение действующего значения «н этого напряжения достигается, когда Т1 и Т2 отпираются на более короткий интервал времени. При активной нагрузке цепь действует в некотором смысле идеально, осущест-168 вляя изменение продолжительности импульса кривой напряжения на нагрузке, причем мгновенное значение напряжения равно нулю в течение интервала времени, когда как Т1, так и Т2 заперты. При индуктивной нагрузке действие схемы рис. 6-La более сложно, так как когда оба вентиля заперты, ток нагрузки должен продолжать протекать по крайней мере в течение части этого интервала времени. В этом случае напряжение на нагрузке не является простой прямоугольно!! кривой, но, больше того, имеется в течение каждого полупериода время, когда индуктивная нагрузка посылает ток обратно в источник постоянного напряжения, так как точка а присоединена к этому источнику через один из обратных диодов Ш или Д2. 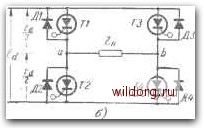 Рис. 6-1. Инверторы с широтным регулированием. а - однофазный инвертор с выведенной средней точкой источника псстоянного напряжения; б -однофазный мостовой инвертор. Р1з-за различия режимов работы схемы рис. 6-1,а в зависимости от вида нагрузки для осуществления идеи широтного регулирования должна быть применена схема, показанная на рис. 6-1,6. Схема рис. 6-1,6 работает следующим образом. Каждый тиристор отперт в течение интервала времени, равного полупериоду выходного напряжения. Кроме того, предполагается, что Т1 и Т2 никогда не включены одновременно. Указанное ограничение распространяется также на тиристорь! ТЗ и Т4. Как и выше, коммутационные цепи на рис. 6-1,6 не показаны и считается, что для осуществления запирания тиристоров после проводящего полупериода применена одна из коммутационных схем, рассмотренных в гл. 5. Кривые напряжений для режима полного напряже-Ш1Я на нагрузке показаны на рис. 6-2. На рис. 6-2,й и 6 показаны потенциалы точек а и b относптельно теоретической средней точкп источника постоянного напряжения. Понятие «теоретическая средняя точка» введено, так как фактически не требуется выводить среднюю точку источника питания. Однако удобно рассматривать напряжение относительно средней точки источника напряжения. Напряжения Ыа-с и щ-о представляют собой кривые прямоугольной в = 120 1&Г то" Рпс. 6-2. Кривые напряжений в аеии по рис. 6-1,6 при углах сдвига 6 = 0 и е=120°. формы, так как точки а и b попеременно присоединяются то к одному, то к другому выводу источника постоянного напряжения. Напряжение на нагрузке составляет: «о-Ь = «а-0-Иб-0- (6-1) На рис. 6-2,е показано напряжение на нагрузке для рассматриваемых условий максимального выходного напряжения. Напряжение на нагрузке будет отклоняться от прямоугольной формы только на небольшую величину, определяемую способом фактически примененной коммутации. Результирующее переменное напряжение имеет практически прямоугольную форму для многих случаев применения инверторов, так как в существующих устройствах с тиристорами время коммутации относительно мало при рабочих частотах инверторов до 1 ООО гц (см. гл. 5). Регулирование напряжения достигается изменением фазы интервалов проводимости тиристоров Т1 и Т2 относительно ТЗ и Т4. На рис. 6-2,г и д показаны условия, когда интервалы проводимости ТЗ и Т4 опережают интервалы проводимости Tl и Т2 на угол 6 = 120°. Напряжение на нагрузке представляет собой знакопеременные импульсы с измененной длительностью, как это показано на рис- 6-2,6. Этот метод широтного регулирования достигается суммированием двух напряжений прямоугольной формы, которые сдвинуты по фазе друг 170 относительно друга. Как видно из рис. 6-2, длительность импульса 180° -О, где 0 -угол сдвига между двумя напряжениями прямоугольной формы Ыа-О и Ub-0- Таким образом, в этой цепи широтное регулирование достигается геометрическим сложением переменных напряжений Ua-o и «ь-о. Напряжение на нагрузке инвертора может плавно регулироваться от максимума до нуля опережением или задержкой управляющих импульсов обеих пар тиристоров друг относительно друга. Когда регулирования напряжения не требуется, угол сдвига может быть зафиксирован на такой величине, которая обеспечивает импульсы со сниженными до минимума определенными гармониками в кривой напряжения на нагрузке. Гармонические составляющие напряжения Ua-b, показанные на рис. 6-2, могут быть выражены в функции угла сдвига: COS nwt. (6-2) где n=I, 3, 5, ... (рассматриваются симметричные импульсы относительно О и п, как показано на рис. 6-3). Здесь COS пш/ dcat; (6-3) "a-fc О, когда -1- < to/ < Y=180 -е. Таким образом, An - j* cos ncot diot -- (6-4) (6-5) n J Q rm 2 (6-6) 171 и, следовательно, sin п4-cosП(о п = 1, 3, 5... (6-7) (6-8) ИЛИ окончательно для амплитуды п-й гармоники a-6(„.., = -i-sin«T- Максимальное значение основной гармоники достигается, когда у = л/2 и амплитуда первой гармоники тогда равна: [Ua-b (1,т)]т=7г/2- • (6-9) На рис- 6-3 показано семейство зависимостей от угла у амплитуд основной и первых трех высших гармоничс--ских составляющих для модулируемой по длительности 0,3 0,2
О го 60 80 100 120 TiO WO UO zoo Рис. 6 3. Кривые амплитуд гармонических составляющих при широтном регу,11ировании, выраженные в долях максимальной алшлптуды основной гармоники. кривой импульса, выраженных в долях от максимального значения амплитуды основной гармонической составляющей, т. е. AEaln. Как показано на рнс. 6-3, амплитуды напряжения гармонических составляющих изменяются периодически 172 В то время, как напряжение основной гармоники уменьшается по мере сужения импульса. При весьма узком импульсе напряжения амплитуды гармонических приближаются к амплитуде основной гармоники. Амплитуды гармонических составляющих, выраженные в про- 0/0 90 70 60 50 fO 30
о 20 1*0 ев so wo 120 iw wo i?,a 200" Рис. 6-4. Гармонические составляющие кр1гвоп импульсов, регулируемых по длительности, выраженные в процентах от амплитуды основной гармоники, получающейся при том же угле у- центах от амплитуды основной гармоники напряжения регулируемого длительностью импульса, показаны иа рис. 6-4. Это очень хороший метод регулирования прн умеренном диапазоне изменения напряжения на нагрузке. Однако когда напряжение должно снижаться до малой величины, гармонические составляющие становятся сопоставимыми по величине с основной гармоникой. На практике дополнительно к гармоническому составу вы.ходного напряжения важно знать длительности интервалов проводимости для каждого тиристора и диода в функцш! коэффициента моишости и длительностп импульса. Эти данные требуются для того, чтобы выбрать устройства соответствующей моипюсти, определить максимальный ток, подлежащий коммутации, и [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [ 28 ] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] 0.0119 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||