
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] Мы получаем У = Уо- (10) Полагая при О г/оДо°=с, мы получим параболы у = сх а при = О (когда выражение j/o/o" может не иметь смысла) - х = 0. При г/о = О мы получаем г/ = 0. Перейдем от системы (8) к одному уравнению, например, записанному в виде dy/dx = by/ax или в виде dx/dy = ax/by. (И) Как было указано, уравнение (И) задает поле линейных элементов, и оно представлено на рис. 6. Если проинтегрировать уравнение (И), то в качестве интегральных кривых в смысле § 10 мы получим параболы (10) и две оси координат. Траекториями системы (8) являются те части (половины) парабол (10) и координатных осей х = 0 и г/ = О, на которые эти кривые разбиваются состоянием равновесия 0(0, 0). Из соотношений (9) видно, что если а < О, b <0, то точка на любой отличной от нуля траектории стремится к состоянию равновесия О при t +°°, а если а > О, 6 > О, то при t -> -оо. Напомним (см. § 5), что когда изображающая точка, двигаясь по отличной от состояния равновесия траектории L, стремится к некоторому состоянию рапновесия A(xq, г/о), то при этом всегда t +°° или t ~оо Таким образом, разбиение на траектории, определенное системой (8) (с указанными на траекториях направлениями)), имеет ) Если особых ЛИНИ11 нет, то для того, чтобы наметить направление па траекториях, достаточно наметить направление в какой-либо одной точке. Тогда во всех других точках направление определяется из соображений непрерывности. Определить же направление в какой-либо точке (хо, j/o), в которой Р{хо, г/о) ф О, можно, вычисляя в этой точке Р(ха, уа) и определяя в стой точке знак Р(хо, г/о); если Р{хо, уо) > О, то в точке (хо, Уо) dxIdt > О, а значит: вблизи этой точки при движении по траектории в сторону возрастания { -х возрастает, что и определяет направления на траектории, проходящей через точку {хд, г/о). Совершенно аналогично можно наметить направления на траекториях, рассматривая знак Q{xo, г/о) в точке, в которой Q{xo. Уо) Ф 0. 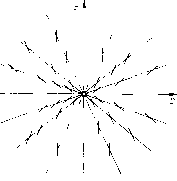 Рис. 6 вид, указанный на рис. 7. Состояние равновесия такого типа называется узлом, устойчивым в случае а < О, b < О (рис. 7, а) и неустойчивым в случае а > О, Ь > О (рис. 7, б). Рассмотрим еще интерпретацию решений системы (8), т. е. интегральные кривые системы (8) в трехмерном пространстве 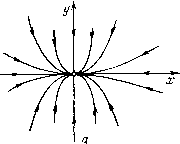 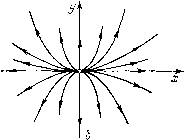 Рис. 7 (х, у, t). Из формул (9) следует, что интегральными кривыми системы (8) в пространстве {х, у, t) являются: 1) ось t, т. е. х = 0, у = 0 (эти уравнения получаются из уравнений (9) при хо = г/о = 0); она проектируется в состояние равновесия О фазовой плоскости; 2) показательные кривые X = ХпС У = 0, расположенные в координатных полуплоскостях х>0, у = 0 или х<0, у = 0 и асимптотически стремящиеся к оси t при t +оо, если а < О, и при -оо, если а > 0; эти кривые проектируются в положительную и отрицательную полуоси абсцисс, являющиеся траекториями системы; 3) показательные кривые аналогичные кривым типа 2); 4) кривые расположенные на параболических цилиндрах у = сх" с образующими, параллельными оси t. Ось t разбивает каждый такой цилиндр на две «половины»; каждая интегральная кривая типа 4) лежит целиком в одной половине цилиндра и асимптотически стремится к осп t при t -Ь<», если а < О, Ь<0, и при t->--оо, если а > О, b > 0. Интегральные кривые типа 4) получаются друг из друга сдвигом вдоль оси t. То же справедливо для интегральных кривых типа 2) или 3). Пример 4. dxIdt = -у + ах, dy/dt = х + ay (12) (а -отличная от нуля постоянная). Векторное поле, определенное этой системой (при а<0), изображено на рис. 8. Решая систему (12) как линейную систему с постоянными коэффициентами, мы получим решение, соот- 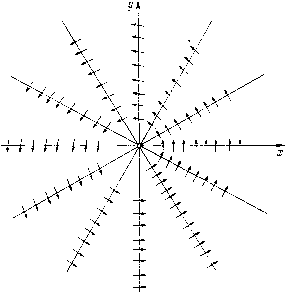 Рис. 8 вегствующее начальным значениям xq, уо, to в следующем виде {оно, очевидно, является функцией t - io в согласии с п. III § 3): X = е" " [Хо cos (i - to) - у о sin {t - t)], у = Л"") [хо sin {t - to) + Уо cos {t - to)]. (13) Характер траекторий рассматриваемой системы удобнее исследовать, переходя к полярным координатам. Мы получим после элементарных вычислений dp/dt = ар, dQ/dt = 1. (14) Решение этой системы Р = Рое = Q„ + t-to (15) является, очевидно, уравнением в полярных координатах траектории системы (12), проходящей при z = Хо через такую началь- [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0127 |