
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [ 97 ] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] ществовать еще 3 предельных цикла. В итоге около точек (О, 0) и (О, будет существовать 3 + 1 предельных циклов при наличии на экваторе сферы Пуанкаре двух седел и узла. При Ъ-к гипербола (6) вырождается в прямую без контакта &г/ + 1 = 0. Для {Ъ, к, n)czDo система (5) также может иметь четыре предельных цикла с распределением предельных циклов 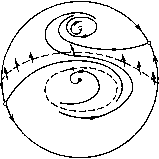 а Ъ-ЗК-5п>0 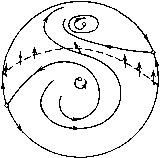 Рис. 156Г ? Ъ-Эн-5тО,н+п<о вокруг фокусов 3 п. 1. При этом топологическая структура рисунка 156Б, а переходит в структуру, изображенную на рис. 156Г, а, структура рис. 156Б, б - в структуру рис. 156Г, б. Теорема 2. Если для системы (5) выполняются условия А и \а\<ао, то при {Ь, к, n)Do, n{b - 3k - 5n)>0 суиествуют такие малые добавки, разрушающие условия А, что измененная система имеет четыре предельных цикла {три вокруг начала координат) при наличии на экваторе сферы Пуанкаре только одной особой точки типа «седло». Доказательство аналогично доказательству теоремы 1. На рис. 156В отмечены штриховкой области, вблизи которых существуют квадратичные системы с четырьмя предельными циклами. § 2. Электрическая цепь с туннельным диодом. Рассматривается система [29] х = у-(р{х)Р, ya-Kx-yQ, о>0, 1>0, (1) где ф(х) имеет падающий участок при аппроксимации ф(х) кубическим полиномом и условиях ф {х) = ах - Ъх + сх а>0, Ъ>0, с>0, Ь-Зас>3а. Последнее эквивалентно условию ттф(х)< -1, при котором в системе возможны разнообразные бифуркации. В случае ттф(х)> - 1 возможными бифуркациями являются только появление и исчезновение состояний равновесия, так как на всей плоскости Рх + ОуфО. 1. Состояния равновесия и их бифуркации. Возможны одно или три грубых состояния равновесия. В случае одного состояния равновесия имеем фокус (узел), устойчивый, если в точке пересечения изоклин выполняется условие ф(х)> -1, и неустойчивый в противоположном случае. В случае трех состояний равновесия между фокусами (узлами) лежит седло. Дискриминантная кривая в плоскости (%, о), отделяюгцая область трех состояний равновесия от области одного состояния равновесия, получается из условия соприкосновения прямой у = а - Хх и кривой г/ = ф(а;), и в параметрическом виде дается уравнениями а = ф (хд) - Хд(р (хд) = - 2axl + bxl, Я = - ф (хд) = - Зах1 + 2Ъхд - с, (3) где Хо - координата точки касания. Значению Хо = &/(За), определяемому из условия ф"(а;о) = = О, соответствует точка возврата дискриминантной кривой. Дискриминантная кривая располагается слева от точки возврата и обращена выпуклостью в сторону области трех состояний равновесия (вторая производная имеет значение (Paldl? = [Ы{Ъ1 {За) - - хо)]~ и меняет знак, когда параметр хо переходит через значение, соответствующее точке возврата). Исключая из (3) параметр хо, уравнение дискриминантной кривой получим в виде А 27аV - 18а&{Х + с)о + АЪа + Аа{Х +с)+ Ъ{Х +с) 0. Координаты точки возврата будут Я2 = (&2-Зас)/(За), 02 = &(27а2). (4) Точкам дискриминантной кривой соответствуют два состояния равновесия системы (1): фокус (узел) и сложное состояние равновесия седло-узел. Точке возврата соответствует слияние трех состояний равновесия. Система (1) будет иметь сложный фокус {Px + Qy = 0) на прямых, выходящих по касательной из точек дискриминантной кривой при Я = 1 в область Я > 1. Для координат состояний равновесия имеем уравнение ах-Ъз? + {с-\-Х)х-аО. (5) Условие Рх + Qy = 0 дает Зах - 2&Х + с -Ы = О, Состоянием равновесия в начале координат будет сложный фокус, если Х> i, или седло, если Х< i. Первая ляпуновская величина для системы (10) имеет вид «3 = ТТТЧТ f3a (i + X)-2 (b - Зас)], (И) 4(;v-i) «а обращается в нуль при X = Хз, Сложный фокус устойчив («3 < 0) при Х>Хз и неустойчив («а > 0) при X < Хз. При Х = Хз («з = 0) устойчивость сложного фокуса определяется знаком второй ляпуновской величины as. откуда •1,2 = ----Xi<iX2. (6) Подставляя (6) в (5), находим для состояния равновесия х = Ll 9аЪс + 9аЬК - 2Ь - 27аа - -{Ь-Зас- За) (бас - 2Ь - За + 9аЛ) = О, (7) для состояния равновесия х = Х2 L2 = 9аЬс + 9аЬК - 2Ь - 27аа + + {Ь-Зас- За)"(бас - 2Ь - За + 9аЛ) = 0. (8) В плоскости параметров X, о прямые (7) и (8) касаются Bepxneii и нижней ветвей дискриминантной криво11 при Л = 1, пересекаются в точке Хо = {2Ъ + За - бас) / (9а), оо =- & (с + 1)/ (9а) и пересекают ветви дискриминантной кривой при Х = Х\: Xi={b-3ac + a)l{a). (9) Координаты Xl и Х2 могут соответствовать как фокусу, так и седлу, и поэтому при переходе через прямые (7) и (8) может менять знак или фокусная, или седловая величины Рх + Qy Перенесем начало координат в состояние равновесия {хо, Уо), где Хо - одно из чисел xi или Х2, определяемых выражением (6). Полагая % = х~-хо, Ц = у - уо, получим вместо (1) систему §==1 + ц-.За[х„-±-)1-а1РА1, Г1), =-4-4QAl.4). Для системы (10) будет К(0,0)+ (О, 0)0, [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [ 97 ] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0104 |