
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [ 84 ] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] Р тР -Оф Состояниями равновесия этой системы являются 01{-я/2, 0), 02{я/2, 0) и Оз(0, 1). Нетрудно убедиться в том, что состояния равновесия Oi и О2 - седла, а также, что для состояния равновесия Оз(0, 1) характеристическое уравнение имеет чисто мнимые корни, и система в окрестности этого состояния равновесия имеет аналитический интеграл, т. е. состояние равновесия - центр. Нетрудно, кроме того, непосредственно проверпть, что кривая р = 3 cos ф интегральная и является сепаратрисой, идущей из седла в седло. Наметив направления на траекториях, составляющих интегральную кривую р = О, мы получаем картину траекторий, изображенную на рис. 137, а б) 1 > Я, > 0. Нри Я, < 1 у системы (2) три состояния равновесия: 0,(-я/2, 0), 02(я/2, 0) и Оз{фз, Рз), где Фз = arcsin Я,, рз = У1 - К. в) Нри Я, > 1 у системы два состояния равновесия Oi и О2. Записывая для всех состояний равновесия соответствующее характеристическое уравнение х2 - ох + А = О, находим: 1) характеристические корни для состояния равновесия Оь Х1 = -1, Х2 = 2(Я+1), т. е. состояние равновесия Oi - седло при всех Я, > 0; 2) характеристические корни для состояния равновесия О2: xi = 1, Х2 = 2{Я-1), т. е. О2- седло при Я,< 1 и неустойчивый узел при Я,> 1. ) Здесь и далее для большей наглядности масштабы на рисунках не всегда соблюдены. И, ВЗЯВ в качестве интегрирующего множителя М = 1/(2Ур), получаем интеграл системы При 1 = 1 будет Х2 = о, т. е. значение Х = 1 является бифуркационным. Состояние равновесия Оз(фз, рз), существующее при Я, < 1, является неустойчивым фокусом или узлом. При Я = 1 состояние равновесия Оз сливается с О2, образуя сложную особую точку, которая ири Я > 1 делается грубым неустойчивым узлом. 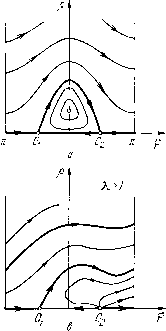 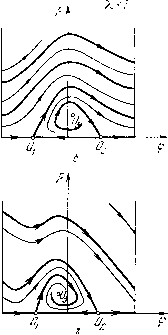 Рис. 137 Разность наклонов траекторий системы (2) при Я > О и Я = О есть 2р {x - sin ф) 2р sin ф 2рХ р - cos ф р - cos ф р - cos ф При р - cos ф > О это выражение положительно, и, следовательно, выше сепаратрисы, и на сепаратрисе консервативной системы р = 3 cos ф, идущей из седла в седло, поле поворачивается на положительный угол. Поэтому нет циклов, охватывающих цилиндр. Так как 2Ур ф ЗцУр то у системы нет предельных циклов, охватывающих состояния равновесия (критерий Дюлака). Сравнивая эту систему с системой (3), мы, так же как и в предыдущем примере, заключаем, что у системы (4) нет предельных циклов, охватывающих цилиндр. Расположение траекторий представлено на рис. 137, г. Пример 3. d(fldt = y=P{(f, у), dyldt = Y -зшф- 2% = (?(ф, у). (К рассмотрению этой системы сводится целый ряд задач: движение маятника с постоянным моментом, динамика синхронного мотора в простейшей идеализации, стабилизация скорости вращения двигателя постоянного тока часовым регулятором и др. В дальнейшем она будет использована и как система сравнения.) Эта система подробно рассмотрена в [162, 2, 3, 149, 39]. Приведем здесь исследование этой системы в простейших случаях: а) = 0, = 0; система имеет вид difjdt = у, dyldt = -sin ф. Очевидно, она имеет интеграл Н (ф, У) = у- cos ф = С. Картина траекторий представлена на рис. 138, а. то нет и циклов, охватывающих состояния равновесия (критерий Дюлака). Расположение траекторий представлено на рис. 137,6 и 137, в. Пример 2 [150]. d(f/dt = p - cos ((1=Р, dpldt = 2p{-np - sin(f) = Q. (4) (Эта система получается пз системы (1) прн Х = 0.) При р = 0 мы получаем систему (соответствующую Я, = О предыдущего примера), изображенную на рис. 137, а. При р > О у системы три состояния равновесия. В точках 6»1(-л/2, 0), 02(л/2, 0) будут седла. Если положить р = tg р, о < р < л/2, то третье состояние равновесия будет Оз(-р, cosp). Оно является устойчивым фокусом или узлом. Так как [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [ 84 ] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0139 |