
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [ 6 ] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] § 8] НАПРАВЛЕНИЕ НА ТРАЕКТОРИЯХ 19 «изображающая точка, двигаясь по L при возрастании t, пересекает данную дугу», «входит в данную область», «стремится к состоянию равновесия» и т. д. или «траектория при t = to пересекает данную дугу», «входит в данную область» или «стремится при t +00 -оо) к состоянию равновесия» и т. д. Состояние равновесия (особая точка) М{а, Ь) системы (А) называется изолированным {изолированной), если существует окрестность точки М{а, Ь), в которой, кроме М, не лежит больше ни одного состояния равновесия. Если все точки кривой являются состояниями равновесия (особыми точками), т. е. во всех точках этой кривой Р{х, у) = Q{x, У)=, то такая кривая называется особой линией системы (А). В некоторых статьях п монографиях (в основном классических, например у Пуанкаре и Бендиксона) вместо установившегося в настоящее время термина «траектория» используется термин «характеристика». § 7. Теорема о непрерывной зависимости решения от начальных условий. Кроме теоремы 1 (о существовании и единственности решения) основной теоремой, описывающей свойства решений, является теорема о непрерывной зависимости от начальных условий. Мы сформулируем ее применительно к системе (А) в следующей геометрической форме. Теорема 5. Пусть Мо{хо, уо) и Mi{xu у\)-две точки одной и той же траектории L, соответствующие [при некотором выборе движения на L) значениям t = to и t = t\. Тогда для любого е > О можно указать т) > О такое, что всякая траектория L, при t = to проходящая через какую-либо точку М ц-окрестности точки Mq, определена при всех значениях t, totti, и при t = ti проходит через некоторую точку Mi окрестности точки М\; каждая точка траектории L, соответствующая какому-либо значению t, tot ti, лежит в е-окрестности точки траектории L, соответствующей тому же значению t). § 8. Направление на траекториях. Изменение параметризации. Как уже было сказано, на всякой траектории L вводится определенное направление в качестве положительного (именно направ- •2) Отметим тот частный случай, когда траектория L является состоянием равновесия О (в этом случае при всех t мы получаем одну и ту же точку О, так как вся траектория является точкой). Тогда из теоремы о непрерывной зависимости от начальных значений имеем: какой бы промежуток значения t, tot ti, мы ни взяли, при всяком е > О найдется Т1 > О такое, что всякая траектория, проходящая при t = tg через ti-ok-рестность состояния равновесия О, в течение значений t,tot ti, не выйдет из 8-окрестности О, т. е., грубо говоря: «чем ближе траектория к состоянию равновесия, тем дольше она около него находится». Очевидно, что при переходе от системы (А) к (А*) направления на траекториях остаются неизменными, если f{x, у)> О, и меняются, если f{x, у)<0. *) Пользуясь кинематической интерпретацией, т. е. считая t временем, можно сказать, что положительное направление на траектории L есть то Hfi-правление, в котором точка М(ф(*), ij)(f)) (x=cp{t), !/ = i)(f) - решение, соответствующее траектории L) движется по траектории с возрастанием t. ленив в сторону возрастания 0)- Введенное таким образом направление не зависит от того, какое из решений, соответствующих траектории L, мы возьмем (так как все такие решения получаются одно из другого заменой ? на t + с). Рассмотрим наряду с системой (А) систему х-Р{х, у), y = -Q{x, у). (А) Векторное поле системы (А) получается из векторного поля системы (А), если изменить направление каждого вектора на про-тивоположное (не меняя длин векторов). Непосредственной проверкой устанавливается, что каждому решению x==q,{t), г/ = ф(0 системы (А) соответствует решение X = (f,{ - t), у = ф( -/) системы (А). Отсюда очевидно, что системы (А) и (А) имеют одинаковые траектории, но индуцируют на траекториях противоположные направления. Таким образом, переход от системы (А) к системе (А) можно рассматривать как изменение параметризации на траекториях, именно как замену параметра t параметром -t. Рассмотрим более общий случай изменения параметризации. Пусть f{x, у) - аналитическая функция, определенная в той же области плоскости, что и функции Р{х, у) и Q{x, у), и пусть функция f{x, у) отлична от нуля во всех точках, отличных от состояния равновесия системы (А) (и имеет один и тот же знак). Рассмотрим наряду с системой (А) систему dx/ds-P*{x,y) = P{x,y)f{x,y), dy/ds = Q*{x, y)=Q{x, y)f{x, у). > Можно показать, что системы (А) и (А*) имеют одни и те же траектории, но с различными параметризациями на них. Именно, можно показать, что между параметрами t п s существует следующая зависимость: Предположим теперь, что функция f{x, у) может обращаться в нуль в точках, отличных от состояний равновесия системы (А), а также может менять знак в области G. Рассмотрим снова систему (А*). Очевидно, что состояниями равновесия системы (А*) являются все состояния равновесия системы (А), а также все точки области G, которые не являются состояниями равновесия системы (А), но в которых f{x, г/)= 0. Кривая /К У)=0 будет особой линией системы (А*) (каждая точка этой кривой является состоянием равновесия системы (А*)). Рассмотрим теперь траекторию L системы (А), отличную от состояния равновесия. Если на траектории L функция f{x, у)Ф Ф О, то, так же как и выше, L является траекторией системы (А*) с измененной, вообще говоря, параметризацией. Если же на траектории L имеются точки S\, S2, S3 кривой f{x, г/)=0, то все точки L, отличные от этих точек, распадаются, как легко видеть, на конечное или счетное число гладких кривых, являющихся траекториями системы (А*) (рис. 4). Направление на f(x.i/H 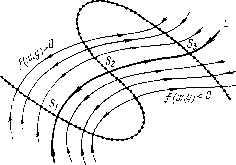 Рис. 4 каждой такой траектории совпадает с направлением на L, если на этой траектории f{x, у)>0, и не совпадает в противном случав. Таким образом, каждая траектория системы (А) либо является траекторией системы (А*), либо состоит из конечного или бесконечного множества траекторий системы (А*). В приложениях часто встречаются динамические системы вида Р {X, У) f (X, у) Q (д, у) f {X, у) (А**) [0] [1] [2] [3] [4] [5] [ 6 ] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.014 |