
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [ 65 ] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] Составляя то же выражение d(x + y)/dt при ХФО, мы получим d (х + y)/dt = 2[{х + у){1~Х(х + у))]. Очевидно, если х+ у> 1/1, то d(x + y)/dt < О, т. е. бесконечность неустойчива. Нетрудно непосредственно проверить, что окружность х+у= Ш является предельным циклом системы (3). Этот цикл рождается из бесконечности. Пример 3. х = у-х{Кх + у-1), y-lx-yiXx + y-i). При Я = О мы имеем, как нетрудно видеть, качественную структуру, изображенную на рис. 109, при Я > О - изображенную на рис. 110. 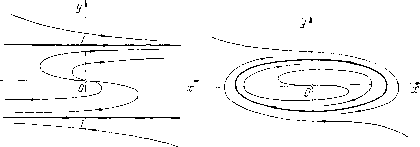 Рис. 109 Рис. 110 Предельный цикл - эллипс х+у1х = т. родился из бесконечности (из пары прямых у - \ = 0). § 5. Условия существования седло-узла и сложного фокуса первого порядка. В гл. 3 и 4 мы предполагали, рассматривая состояния равновесия, для которого А = О, а также рассматривая сложный фокус (А > О, 0 = 0), что в окрестности этого состояния равновесия система приведена к каноническому виду. Однако при качественном исследовании конкретных динамических систем это бывает очень неудобно, так как приведение к каноническому виду иногда требует больших вычислений. В настоящем параграфе мы дадим условия для существования двукратного седло-узла, а также для существования сложного фокуса первой степени негрубости, предполагая, что в окрестности со- *) Неравенство нулю I означает, что состояние равновесия дву- кратное. Когда система имеет канонический вид, то I (Я?) = Р(1, 0) (см. гл. 9). СТОЯНИЯ равновесия 0(0, 0) система имеет общий вид, т. е. dx/dt = ах + by + f{x, у), dy/dt сх + dy + g(х, у), (4) где f{x, у) и g(x, у) содержат члены по а; и г/ порядка выше первого. Коэффициенты в разложении правых частей по х, у предполагаются зависящими от параметра X. Характеристическое уравнение для рассматриваемого состояния равновесия 0(0, 0) имеет вид - ах -Ь А = О {а = а + d, А = ad - be). Условия устойчивости состояния равновесия 0(0, 0) (условия Рауса - Гурвица) сводятся к неравенствам a = a + d<0, А = ad - Ъс > 0. Разложение f{x, у) и g{x, у) по степеням хиу представим в виде fix, у) = Р2{х, у) + Рг{х, у)+..., g{x, y)=Q2{x, y)+Qi{x, у)+ Рг {х, г/) = агож + ау уху + ао2У, Qiix, у)= Ъгах" + Ьцху + 6o2г/ Рз{х, у) = азох + a2ixy + аху + аозУ, q3(x, у)= Ьзох + b2ixy + bi2xy + Ьоау. I. Пусть при некоторых значениях параметров Х = ХЧ мы имеем в точке 0(0, 0) А(Я?) = 0, в{хГ)фО. Для определенности предположим, что в системе (4) аФО. Этого всегда можно добиться, заменяя х на у или наоборот. Для того чтобы состояние равновесия 0(0, 0) было седло-узлом, нужно, чтобы величина ¥=0), причем ("> = 7(?W"--"-- а(а -\- ос) а{а+Ьс) " ~ "" ~ "" + + 6V(ca(,2 -абоа)]. ) Все коэффхщиенты берутся при значениях параметров Я?. Все коэффициенты предполагаются взятыми при значениях h = К. П. Пусть при некоторых значениях параметров Я = Я? мы имеем в точке 0(0, 0) а=(а + й)=ОиА>0 (т. е. состояние равновесия 0(0, 0)- сложный фокус). Вычисление дает для = (Я?) следующее выражение через коэффициенты системы ): + (ацао-! + 2а(,2Ьо2) - 2ас {Ь - адад) - 2аЬ (яр - ЬдЬ) - - Ь (202020 + Kibg) + (be - 2а) {bb - аа)] - - (а + be) [3 (cbgs - bag) + 2а (a.i + b) + (са - bib)]}. Коэффициенты членов Pi{x, у), Qi{x, у) (t > 3) не входят в выражение для Li (Я,). Здесь = ad - be = - {а + be) > 0. Поведение динамических систем вблизи таких значений параметров, при которых первая ляпуновская величина Li обращается в нуль, существенно зависит от знака второй ляпуновской величины L2 = a,(?)- Для вычисления L необходимо учесть в разложениях правых частей уравнений члены до пятого порядка включительно. В зависимости от первой и второй ляпуновских величин и знака действительной части корней характеристического уравнения в малой окрестности состояния равновесия на фазовой плоскости могут существовать один или два предельных цикла при всех возможных сочетаниях устойчивости и неустойчивости (один устойчивый или неустойчивый предельный цикл или два предельных цикла - устойчивый внутри неустойчивого или наоборот). Пусть в некоторой точке М пространства параметров системы а + d = Ll = О, L2 = 0. Тогда, каково бы ни было положительное число "( < 1, можно найти такие числа ео > О и б > О, что для точек из ео-окрестности точки М справедливы следующие утверждения [121]: 1) если в точке М в ряду ст, Li, L2 имеется две перемены знака, то в бо-окрестности состояния равновесия соответствую- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [ 65 ] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0135 |