
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] Ниже перечислены все возможные типы состояний равновесия с не равными нулю действительными частями характеристических корней и приведены схематические рисунки расположения траекторий в их окрестности. При этом для недикритического узла и для седла рисунки приводятся как в случае, когда рассматриваемая система имеет канонический вид (когда направления, по которым к состоянию равновесия стремятся траектории, совпадают с направлением осей координат), так и в общем случае (т. е. в случае, когда система не имеет канонического вида, так что направления ki и /с2 могут быть любыми). I. Узел (характеристические корни Xi и Х2 действительны и одинаковых знаков, т. е. > 0; А > О, - 4А > 0). А. Невырожденный узел (Xi ¥= Х2): а) устойчивый: Xi < О, Хг < О, т. е. о<0 (рис. 41, 44); б) неустойчивый: Xi > О, Хг > О, т. е. о > 0. (Рисунки даются только для устойчивого узла, в случае неустойчивого узла надо переменить направление стрелок. При этом рис. 41 соответствует случаю, когда система имеет канонический вид, а рис. 44 соответствует общему виду.) Б. Вырожденный узел (Xi = Хг = X, но в канонической форме р, =5 О, А > о, 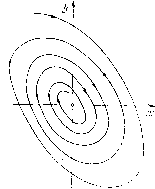 о2-4А = 0): (рис. 43, Рис. 50 а) устойчивый: X < О 45); б) неустойчивый: X > 0. (Рис. 43 соответствует случаю, когда система имеет канонический вид, а рис. 45 соответствует общему виду.) В. Дикритический узел (Xi = Хг =Х и IX = 0): а) устойчивый: Х<0 (рис. 42); б) неустойчивый: Х>0. П. Седло (характеристические корни Xi и Хг действительны и разных знаков, т. е. XiX2 < О, либо Xi > О, Хг < О, либо Xi < О, Хг > О, А < 0) изображено на рис. 46 и 47 (рис. 46 соответствует случаю системы в каноническом виде при Xi > О, Хг<0, рис. 47 - общему случаю). 111. Фокус (характеристические корни комплексные сопряженные, т. е. А > О, 0 - 4А < 0): а) устойчивый: а < О (о < 0) (см. рис. 48 и 49 для устойчивого фокуса в случае канонического вида системы: рис. 48 соответствует случаю Р > О, рис. 49 - случаю р < 0; рис. 50 соответствует случаю, когда система имеет общий вид); б) неустойчивый: а > О (о > 0). Пример 1. х = У, у = х{а - х)+ by. Состояние равновесия 0(0, 0)-седло. Определим направления сепаратрис в седле. Уравнение для нахождения углового коэффициента сепаратрис в седле имеет вид - Ък - а? = О, откуда А;, 2 - 6/2 ± ГЬ2/4 + а?. Пример 2. х==-х{2 + у), г/ = а;+рг/. Состояние равновесия 0(0, 0)- седло. Уравнение для определения направлений сепаратрис в седле: ( + 2)/с-Ь 1 = О, откуда к = -1/(2+ Нетрудно видеть, что второе значение к есть о, а сепаратриса с наклоном к = оо есть прямая х = 0. ГЛАВА 4 КАЧЕСТВЕННАЯ СТРУКТУРА ОКРЕСТНОСТЕЙ НЕКОТОРЫХ СЛОЖНЫХ СОСТОЯНИЙ РАВНОВЕСИЯ § 1. Направления, в которых траектории стремятся к сложному состоянию равновесия. При исследовании сложных состояний равновесия иногда бывает весьма существенно знание направлений, в которых траектории могут стремиться к этому состоянию равновесия ). Рассмотрим динамическую систему dxldt = Р {х, у), dyldt = Q {х, у), для которой начало координат является сложным состоянием равновесия, так что (0,0)= О, (3(0, 0)= О, р;(о,о) р;(о,о) ;(0,0) Qy (0,0) Предположим, что разложения правых частей в ряд по степеням X, у в окрестности точки 0(0, 0) имеют вид Р(х, у) = Рт(х, !/) + <p(x, у), Q{x, y)Qrn(x, у) + (х, у), где т> i, Рт(х, у) и Qm(x, у)- однородные многочлены, состоящие из всех членов т-го порядка соответствующих разложений, а функции (р(х, у) и \j)(a;, у) - ряды, состоящие из членов более высоких порядков. При этом мы считаем, что многочлены Рт(х, у) и Qm(x, у) одновременно не равны тождественно нулю (в противном случае мы бы взяли т > т). Рассмотрим выражение xQm(x, у)-уРгп(х, у), (2) а также выражение Qr.(i, k)-kP(i, к), = 0. (1) ) Методы исследования сложных особых точек (метод Бендиксона [143] и метод Фроммера [132]) опираются на рассмотрение траекторий, стремящихся в определенном направлении. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0134 |