
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [ 19 ] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] топологическую структуру), если существует такая окрестность и ТОЧКИ О, не содержащая других состояний равновесия системы (А), что, сколь малое е > О мы бы ни взяли, можно указать такую область и , целиком лежащую в е-окрестности О, и такое 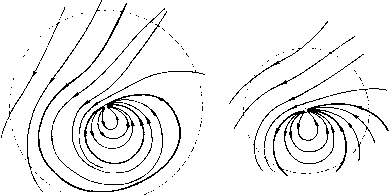 Рис. 30 топологическое отображение и на и, при котором траектории отображаются в траектории ). Всякая область и, обладающая указанными в приведенном выще определения свойствами, называется собственной окрестностью состояния равновесия. Как и всюду выще, предположим, что число особых траекторий рассматриваемой системы (А) в случае, когда система определена в ограниченной области, конечно в этой области, а в случае, когда эга система определена на всей плоскости, конечно во всякой ограниченной области плоскости. Установим при этом предположении возможный характер собственной окрестности состояния равновесия. Из теоремы 7 ири сделанном предположении следует: Если в любой сколь угодно малой окрестности состояния равновесия О лежит замкнутая траектория, то все траектории, про- Нетрудно привести пример состояния равновесия, не имеющего определенной топологической структуры в указанном выше смысле. Пусть, например, вокруг данного состояния равновесия существует бесчисленное множество вложенных друг в круга колец, заполненных замкнутыми траекториями. Пусть эти кольца перенумерованы в порядке их вложения друг в друга. Предположим, что между ге-м и ге -f- 1-м кольцом лежит п предельных циклов. Нетрудно убедиться, что у такого состояния равновесия нет определенной топологической структуры в смысле данного в тексте определения. Такой пример возможен в динамической системе класса С", но невозможен в аналитической системе. 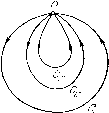 ходящие через точки некоторой достаточно малой окрестности О, замкнуты. Состояние равновесия в этом случае называется центром. Рассмотрим случай, когда в любой сколь угодно малой окрестности состояния равновесия О нет замкнутых траекторий. Пусть Zo - окружность с центром в точке О столь малого радиуса го, что внутри Zo, кроме О, не лежит целиком ни одна особая траектория. Можно показать, что всякая положительная или отрицательная полутраектория, целиком лежащая внутри такой окружности, стремится к состоянию равновесия О. Если существует окружность Со радиуса го такая, что все траектории, проходящие через точки внутри некоторой окружности С радиуса г го при t-* +0° -00), не выходя из Со, стремятся к состоянию равновесия О, а при убывании (возрастании) t выходят из Со, то состояние равновесия О называется топологическим узлом. Узел в примере 3 и фокус в примере 4 являются топологическими узлами. Теорема 17. Если состояние равновесия О есть топологический узел, то в любой сколь угодно малой его окрестности можно указать цикл без контакта, содержащий это рд,, 3 состояние равновесия внутри. Рассмотрим состояние равновесия, не являющееся топологиче-ческим узлом. Предположим, что существует траектория L, которая, не выходя из окружности С, стремится к состоянию равновесия прн f -> + оо и при t - °о. Пусть Сь - замкнутая кривая, состоящая из траектории L ж точки О (рис. 31). Нетрудно показать, что всякая траектория L, проходящая через точку внутри Сь, стремится при t + °о ж f - оо к состоянию равновесия О и вместе с точкой О образует простую замкнутую кривую Cl- При этом каждая из двух областей, ограниченных двумя различными такими кривыми Сь п Ci", лежит одна внутри другой. Область, ограниченная кривой Сь, называется эллиптической или замкнутой узловой областью и обозначается через N,. Две эллиптические области считаются различными, если они лежат одна вне другой. Рассмотрим теперь две стремящиеся к состоянию равновесия полутраектории L\ и L2, имеющие точки вне окружности С (каждая из этих полутраекторий может быть как положительной, так и отрицательной) (рис. 32 и 33). Пусть М\ ж М2 - соответственно последние о,бщие точки этих полутраекторий с окружностью С (так что часть MiO полутраек- тории Ll и часть МО полутраектории L2 уже не имеют общих точек с С, кроме Mi и М). Рассмотрим область а, граница которой состоит из части М\0 полутраектории Li и части МО полутраекторип L2, точки О и той из дуг окружности С с концами Mi и М, на которой направление от точки Ml к М2 является движением против часовой стрелки на С. Будем область а называть областью {сектором) между полутраекториями Ll и L2"). При этом: 1) область а между полутраекториями Ll и L2 будем называть гиперболической или сед-ловой областью {сектором) и обозначать через Ос, если через все 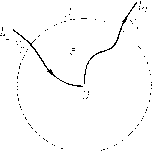 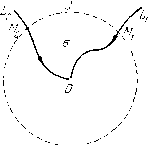 Рис. 32 Рис. 33 точки этой области проходят траектории, как при возрастании, так и при убывании t выходящие из а. В этом случае Li и L2 являются, очевидно, сепаратрисами состояния равновесия, причем одна из них стремится к О при t + оо, а другая - при - оо (см. рис. 27, где под L+ понимается полутраектория L2, а под L~ - полутраектория. Li). 2) Область а между полутраекториями Ll и L2 называется параболической или открытой узловой областью (сектором), если через все точки этой области, лежащие внутри некоторой достаточно малой окружности С {С лежит внутри С), проходят траектории, которые при - + 00 (f oo), не выходя из а, стремятся к состоянию равновесия О, а при убывании (возрастании) t выходят из а ). Окружность с при такой терминологии не указывается; это находится в согласии с тем, что сказанное ниже относительно характера области о не зависит от окружности С, если только радиус этой окружности меньше некоторого определенного числа го. Порядок, в котором перечисляются траектории Ц и Lc- очевидно, не безразличен. *) Если все полуграектории параболической области стремятся к состоянию равновесия при t-f-oo [t-00), то они, очевидно, являются о)-(а)-орбитно-устойчивылш. Однако среди них могут быть полутраектории особых траекторий, являюш;ихся а-((о)-орбитно-неустойчивыми. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [ 19 ] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0095 |