
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [ 136 ] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 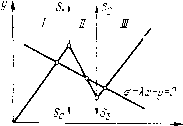 Рис. 214 ветви характеристики, в области - падающий участок (рис. 214). 1. Состояния равновесия. Разбиение пространства параметров по числу и характеру состояний равновесия. Возможны одно и.яи три грубых состояния равновесия. В случае одного состояния равновесия имеем фокус (узел), всегда устойчивый в областях / или / и неустойчивый в области , если ос2>1. В случае трех состояний равновесия имеем всегда устойчивые фокусы (узлы) в областях / и / и седло в области . Куски прямых о = XlK + + У1 и а = Х2к+У2 (Хи У\ и Х2, У2 - координаты угловых точек характеристики) нри Ж осг образуют в плоскости (Я, о) дискримп-нантную кривую, отделяющую область трех состояний равновесия от области одного состояния равновесия. Точкам дискриминантной кривой соответствует сгиитое состояние равновесия типа седло-фокуса или седло-узла, и угловой точке (А, = ос2)-неустойчивый отрезок покоя, совпадающий с падающим участком характеристики. В случае ос2 < 1 невозможны замкнутые траектории и возможными бифуркациями являются только ноявление и исчезновение состояний равновесия. Все нижеследующие рассмотрения ведутся для случая 0С2>1 и (oci - 1) < 4ос2, допускающего разнообразные бифуркации. 2. Бифуркации состояний равновесия. 2.1. Устойчивость состояния равновесия на линии сшивания. Пусть прямая а - Кх - уО проходит через угловую точку {х\, у\) характеристики на границе I ш II областей и пусть А, > (ос2 + 1)74 > «2. Тогда область / заполнена кусками траекторий устойчивого фокуса, а область - неустойчивого. Вводим на линии сшивания областей I и II положительные координаты и Si (а на линии сшивания областей и / - координаты 2 и з) (см. рис. 214). Преобразования Sq-Si по траекториям области / и 5] 0 по траекториям области запишутся так: Si=Soexp{-hin[(Oi}, So = Si ехр{-h2n[(02}, (2) где (Hi, -hi (j = l, 2)-мнимая и действительная части корней характеристического уравнения соответственно для областей I ш II. Состоянием равновесия будет сшитый центр (5о = 5о), если hjdT + 2й2 =0> или, в раскрытом виде, Я = Я+ = (aicca + 1) (а, - «2 + 2)" Фокус на склейке будет устойчив {So<So) нри К Ж* и неустойчив {So> So) нри Я < Я"*". 2.2 Рождение предельного цикла из состояния равновесия типа фокус при перемещении состояния равновесия через линию сшивания. Докажем, что в областях I и II может существовать не более одного предельного цикла. Рассмотрим преобразование о-о по траекториям областей / и . Для области / будет где бо - расстояние от границы раздела областей I и II jso состояния равновесия; % т 1 - монотонные функции (возрастающие или убывающие в зависимости от знака бо). Преобразование по траекториям области записывается аналогично. Вычисление производной функции последования дает dSjdS„ = ЗД- ехр {- 2 {hx, + h}. (4) Здесь т и Э - время движения соответственно по траекториям областей / и Я, Ai = (1 + ai)/2 > О, А2 = (1 - а2)/2 < 0. Пусть состояние равновесия лежит в области /. Тогда для периодического решения {S = So) с увеличением о время Ti убывает (до значения л/coi), время 9 возрастает (до значения л/шг) и производная (4) растет. Поэтому может существовать не более двух точек пересечения функции последования с биссектрисой, причем неподвижная точка с меньшей координатой должна быть устойчива, а с большей - неустойчива. Так как, по предположению, состояние равновесия лежит в области / и является устойчивым фокусом, который не может охватываться устойчивым же циклом, то в областях I и II может существовать не более одного, причем неустойчивого цикла. Пусть состояние равновесия лежит в области . Тогда с ростом 0 время Ti растет, а Э убывает. Аналогично находим, что в этом случае может существовать не более одного устойчивого предельного цикла. Пусть о - Яж - г/ = О проходит через верхнюю угловую точку характеристики. Рассмотрим два случая. 1. Я>Я". Сшитый фокус устойчив. Траектория, проходящая через нижнюю угловую точку, в силу (2) при t-°o накручивается к состоянию равновесия. Эта траектория остается спиралью и при малых смещениях прямой а - кх - у = 0. Если при малом смещении состояние равновесия ионадает в область , то оно становится неустойчивым и, следовательно, появляется хотя бы один устойчивый предельный цикл. По сказанному выше этот цикл единственный. Пусть после смещения состояние равновесия попадает в область /. Так как в объединении областей / и возможно существование не более одного цикла и фокус сохраняет устойчивость, то, следовательно, циклы не возникают. 2. Ж Х. Аналогично находим, что если при малом смещении состояние равновесия попадает в область , то циклы не возникают, а если в область /, то появляется неустойчивый цикл. 2.3. Рождение предельных циклов {простого или двойного) из границы области, заполненной замкнутыми траекториями. Рас-cinoTpuM преобразования So = f{So), склеенньхе из двух кусков: So = (f{So) - по траекториям областей / и и 5о = i]?(о) - по всем областям. Покажем, что f{So) дифференцируема в точке склейки. Преобразование Sq-S] но траекториям области / дано в (3). Преобразования S\j S2, 82- S3 и записываются анало- гично. Значение dSo/dSo для функции ф(<5о) дано в (4), а для функции {So) будет dSg/dS, = SgSo ехр {- 2h (т + Тд) - 2h, {г, + т,)}. (5) Здесь Tl и тз - время движения по областям / и /, тг и Т4 - время движения по верху и низу области . Пусть Sg = So- граничное значение, разделяющее интервалы определения преобразований ф(5о) и г)(5о). Производные для Ф и г) в точке склейки совпадают: при S = Sg будет тз = О, Э = 9*, T2+T4 = 9*. Пусть теперь прямая а - Кх - у - О проходит через угловую точку характеристики xi, у\ и Я = Я. Покажем, что предельных циклов нет. Функция последования на плоскости (о, о) склеена из отрезка биссектрисы 5д=5„<5о и кривой So - (So). Функция So = f{So) дифференцируема в точке склейки и, следовательно, нри Я = Я+ будет dSo/dSo=i (из (5) находим также, что d5„/dSo-<0). При возрастании от значения S* показатель экспоненты в (5) монотонно убывает от нулевого значения в точке склейкп (ti = const, тз растет и h\>0; тг и Т4 убывают и Л2<0). Других точек пересечения (или касания) с биссектрисой, кроме S = So, у кривой So = (So) быть не может. Кривая для •Sfl 0 располагается ниже биссектрисы. Спирали, сшитые пз траекторий в областях /, и /, накручиваются на границу области, заполненной замкнутыми кривыми, сшитыми из траекторий в областях I и II. При малом изменении параметров а и Я функция последования измененной системы лежит в малой окрестности функции последования исходной системы. Если сдвигаться но полупрямой Li = 0 {Li = а - Kxi - yi, Я>ос2) от значения Я = Я"" в сторону уменьшения К, то функцией последования для S < S* будет прямая, проходящая через начало координат выше биссектрисы, [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [ 136 ] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0117 |