
|
|
|
Главная страница Приемы качественного исследования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [ 10 ] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] ную точку М{хо, г/о), полярные координаты которой (ро, 9). Исключая t - fo из (15), получаем а(е-е„) (16) Уравнение (16) дает, очевидно, все траектории системы (12), Если ро=50, эти траектории являются логарифмическими спиралями. При Ро = О получается состояние равновесия 0(0, 0). Первое из двух уравнений (15) показывает, что все траектории стремятся к состоянию равновесия О при t ->- +<», если а < О (рис. 9), и при --оо, если а>0 (рис. 10). Состояние равновесия такого типа, как в данном примере, называется фокусом. 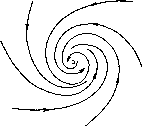 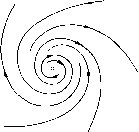 Рис. 9 Рис. 10 устойчивым в случае а < О и неустойчивым при а > О (точное определение фокуса будет дано в дальнейшем). Рассмотрим уравнение dx dy - у-\-ах ~ х-\-ау соответствующее системе (12). Оно очевидно является однородным. Интегрируя его (с помощью подстановки у/х = и или х/у = и), мы получим соотношение ) + ce2""*8Wv)=o. (18) Первое из этих соотношений является общим интегралом системы (в смысле § 10) во всякой области, не содержащей точек оси,л; (т. е. точек х = 0), а второе - во всякой области, не содержащей точек оси у =0. Однако ни одно из этих соотношений не является в строгом смысле слова общим интегралом системы в области, содержащей точку О. «Целую» интегральную кривую. *) Очевидно, что мы можем получить эти соотношения также из уравнения траекторий в полярных координатах, возвращаясь от них к координатам X а у. расположенную в такой области, можно получить, «склеивая» куски кривых (17) и (18). Рассмотрим интерпретацию в трехмерном пространстве. Как и в предыдущем примере, ось t является интегральной кривой системы (12) в пространстве {х, у, t). Остальные интегральные кривые расположены на цилиндрических поверхностях, имеющих своими направляющими спирали (16), а образующими - прямые, параллельные оси t. Эти интегральные кривые асимптотически приближаются к оси t при t ->- если а < О, и при t -оо, если а > 0. Отметим, что хотя формы траекторий в примерах 3 и 4 при а < О, 6 < О и а<0 (а>0, 6>0 и а>0 соответственно) существенно отличаются, но в некотором смысле поведение .траекторий в том и в другом случаях одинаково: именно, в обоих примерах все отличные от состояния равновесия траектории при t +оо (или t -оо) стремятся к состоянию равновесия. Пример 5. dx/dt = -y, dy/dt = х. (19) Эта система получается как частный случай системы (12) при а = 0. Решения, соответствующие начальным значениям хо, г/о, о, имеют вид x = xocos{t - to) - г/о sin (i - to), у = xosin{t- to) + Уо cos{t - to). 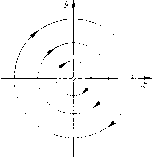 Рис. 11 (20) Непосредственной проверкой (или используя (20)) нетрудно убедиться, что + у = С (21) является общим аналитическим интегралом системы. Таким образом, в этом случае система имеет аналитический интеграл. Траекториями системы, очевидно, являются состояние равновесия 0(0, 0) и замкнутые траектории - концентрические окружности с центром в начале (рис. 11). Решения (20), соответствующие замкнутым траекториям - окружностям, являются периодическими функциями с шериодом 2я. Интегральными кривыми в трехмерном пространстве {х, у, t) являются ось t и винтовые линии, расположенные на круглых цилиндрах с направляющими (21). Шаг каждой винтовой линии равен 2л. Пример 6. dx/dt = -x, dy/dt = у. (22) Векторное поле изображено на рис. 12. Решение системы, соответствующее начальным значениям хо, уо, to, имеет вид х = х„е (23) -о у - Уо Точка 0(0, 0)- состояние равновесия. Система имеет аналитический интеграл ху = С. (24) Интегральными кривыми являются при СФО гиперболы (24) и при С = О - координатные осп х = О и у = 0. Каждая гипербола состоит пз двух траекторий (ее ветвей), и каждая пз координатных осей - из трех траектории (состояния равновесия О и 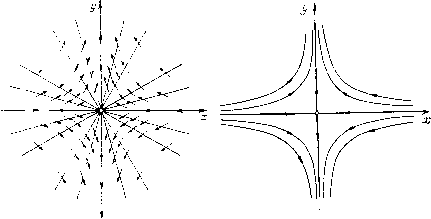 Рис. 12 Рис. 13 двух полуосей). Соответствующее разбиение на траектории указано на рис. 13. Из выражений (23) очевидно, что траектории, являющиеся полупрямыми оси X (получающиеся из (23) при г/о = 0), стремятся к состоянию равновесия при t +°о, а траектории, являющиеся полупрямыми оси г/,-при t-°о Других траекторий, стремящихся к состоянию равновесия О, система не имеет. Состояние равновесия такого типа, как у данной системы, называется седлом: Траектории, стремящиеся к седлу О, в данном случае четыре полуоси х = Ожу = О, называются сепаратрисами седла. Траектории, сколь угодно близкие к точке сепаратрисы, стремящейся к О при t -boo -оо), при неограниченном возрастании (убывании) t удаляются от этой сепаратрисы. Обратим внимание на то, что такое поведение траекторий, очевидно, ни в какой мере не противоречит теореме 5 § 7 (о непрерывной зависимости от начальных условий), так как эта теорема рассматривает поведение близких траекторий только на конечном проме- 3 н, Н. Баутин, Е. А. Леонтович [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [ 10 ] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] 0.0109 |