
|
|
|
Главная страница Электростатика проводников [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [ 77 ] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] [190] [191] [192] [193] [194] [195] [196] [197] [198] [199] [200] [201] [202] [203] [204] [205] [206] [207] [208] [209] [210] ОТВЕТЫ И РЕШЕНИЯ Глава I ВЕКТОРНОЕ И ТЕНЗОРНОЕ ИСЧИСЛЕНИЕ § 1. Векторная и тензорная алгебра. Преобразования векторов и тензоров I. созв = п • п = cos 1?cos 1? + sini?sini?cos(a - а). 3. Так как 6» (г = 1,2,3) - компоненты вектора, то при повороте системы координат 6 = афк- Подставив 6 в равенство а\Ь\ = inv и сравнив с СкЬк = inv, получим Ск = «га, т. е. Ок преобразуются при поворотах как компоненты вектора. Поскольку инвариант (скаляр) при отражениях не меняет знака, компоненты а» и 6г, либо одновременно должны менять знак (полярные векторы либо не менять его (псевдовекторы). 10. (а X Ь)о = i(a i6+i - a+i6 i), (а х b)±i = ±z(ao6±i - a±i6o), (a. b) = 5 {-ira-,b„ r, = Jf-rYi,. II. Тензор, обратный данному, удовлетворяет соотношениям -1 ik Это - алгебраические уравнения относительно компонент ei обратного тензора. Их решения имеют вид 1 Ды ik - У> где Afct - алгебраическое дополнение элемента Sik в определителе £. Из формулы (2) следует, что для существования обратного тензора необходимо, чтобы £ ф 0. Учитывая известное свойство определителя Afci£fc/ = 6ц\е\, убеждаемся, что обратный тензор удовлетворяет, наряду с (1), также условиям ikki = hi- (3) Если £ik - симметричный тензор, заданный в главных осях: £ik = £Sik (здесь суммировать по г не нужно), то 14. Tik образуют тензор II ранга. 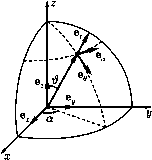 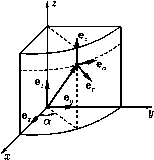 Рис. 46 Рис. 47 15. При преобразовании -> е< по формулам е< = aikBk, коэффициенты aik = i • имеют смысл проекций новых ортов на старые. Выполняя проектирование (рис. 46,47), получим следующие матрицы преобразования: при переходе от декартовых координат к сферическим, /sin 1? cos а sin 1? sin а cosi? \ cos 1? cos а cos i? sin a \ -sina cosa -Sim 0 (sin V COS a cos i; cos a - sin a\ sin 1? sin a cos i? sin a cos a C0S1? -sini? 0 / при переходе от декартовых координат к цилиндрическим, sina 0\ /cosa -sina 0\ cosa О О (cosa - sin а cos а О О О 1/ а = I sina в случае поворота. 5И = / cos а sin а 0\ - sina cosa О V О 0 1; Направление отсчета угла а и направление оси z удовлетворяют правилу правого винта. 17. Воспользовавщись результатами предыдущей задачи, получим 5(ai0a2) = g{a2)g{9)g{ai) = cosai cosa2-cosflsinai sina2; sinai cosa2--cos6cosai sina2; sin6sina2 cosai sina2-cosflsinai cosa2; -sin ai sin 02-boos б cos ai cos 02; sin6cosa2 sin ai sin в -sin в cos ai cos в / f i(l-bcose)e(«i+«=i); ieia2; -1(1 -cose)e*(«2-ai) -i(1 - cose)e*(«i; - sinOe*"; i(1 -b cose)e-*(«i+«2) 19. Так как матрица поворота на нулевой угол (тождественное преобразование) равна 1, то при повороте на малый угол \Sik\ <С 1. Для доказательства соотнощения Sik = -еы воспользуемся инвариантностью = = SikXiXk относительно вращений. Поскольку х = очкХк = Xi+ SikXk, то с точностью до малых величин первого порядка имеем г = -Ь 2sikXiXk. Из инвариантности следует, что SikXiXk = О при произвольных х», а это возможно только при Eik = -Ski- Введем вектор 5(р с компонентами S(fii = = eikiSki- Тогда г = т + S(p X т, откуда видно, что Sep представляет собой вектор малого угла поворота, направление которого указывает ось вращения, а величина - угол поворота. 16. Обозначив через д матрицу, связывающую компоненты вектора в системах 5 и 5 (А< = дгкАк), имеем: в случае отражения, /-10 0\ 5- = О -1 О ; V О 0-1/ [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [ 77 ] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] [190] [191] [192] [193] [194] [195] [196] [197] [198] [199] [200] [201] [202] [203] [204] [205] [206] [207] [208] [209] [210] 0.0124 |