
|
|
|
Главная страница Источники вторичного электропитания [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] грузки состоит из ДТ, АЦП н ВУ. Выходным сигналом ВУ является число / преобразовательных модулей, на которые должны поступать через коммутатор К сигналы управления с коэффициентом заполнения г- Ц f/н (W/„ max)J, где Z [ ] - целэя часть числа в квадратных скобках; Рнтах/РиМ - /нтах/ПМ - НбОбхОДИМОС ЧИСЛО модулей для перекрытия всего диапазона изменения тока нагрузки - от тока /пм одного модуля до максимального тока нагрузки /нтах- Одним из основных условий нормальной работы ДИО, выполненного на основе коммутации модулей вида ПР - ПР, является равномерное распределение тока нагрузки между работающими (включенными) модулями. Для более полного выполнения этого условия для адаптивных ИВЭП с бестрансформаторным входом, работающих при innpoKOM диапазоне изменения тока нагрузки /„, целесообразно ввести в каждый модуль собственный регулятор тока, т. е. применить в качестве модуля автономный стабилизатор тока. На рис. 1.8 приведено УУ ДИО с возможностью его адаптации по кратности изменения тока нагрузки в широком диапазоне за счет изменения напряжения опорного источника и oil = var. Каждый модуль имеет регулятор тока релейного типа (измерительные резисторы Ri - Rn и пороговые устройства ПУ1 - ПУм). Уровень стабилизируемого тока каждого модуля определяется общим сигналом управления U., поступающим на один из входов ПУ. Поэтому токовая загрузка всех модулей получается одинаковой. Сигнал соответствует сигналу датчика тока, и его уровень ограничивается с помощью ограничителя О во время запуска устройства, так как ток нагрузки не успевает мгновенно вырасти до номинального значения и уровень напряжения на выходе ИО будет максимальным. Таким образом, исключается перегрузка модулей во время запуска. Ограничитель О выбирают с учетом, чтобы напряжение и о не превышало допустимого. При отказе модуля происходит выгорание его предохранителя. При этом токовая загрузка работающих модулей увеличивается на значение. UJHMW Рис. 1.7 Н=>, Oon=var Рис. 1.8 равное IumIN {N - 1), что при N 5-10 составляет менее 10- 20 % номинальной загрузки. Таким образом, при отказе модуля в устройстве исключается токовая перегрузка исправных модулей и ток нагрузки поддерживается на заданном уровне. Для обеспечения постоянства КПД ДИО предусмотрено автоматическое отключение «лишних» модулей в случае уменьшения уровня стабилизации тока /„, поскольку уменьшение напряжения Uсопровождается снижением уровня сигналов и Ь\. что приводит к снижению выходных токов всех модулей. Если сигнал 1\ достигает своего нижнего уровня, то срабатывает пороговое устройство ЯУ и напряжение на его выходе становится отрицательным. Через время, определяемое временем задержки /?С-цепочки, происходит переход компаратора К в состояние, при котором на ПУы поступает закрывающее напряжение. Это приводит к отключению модуля ЯМл- и, следовательно, к росту токовой загрузки включенных модулей, так как уровень сигнала увеличился, а также к переходу ЯУ в свое нейтральное состояние. При этом компаратор К остается в новом состоянии, чем обеспечивается закрытое состояние модуля HMn- При дальнейшем уменьшении уровня стабилизации тока /„ сигнал Li уменьшается до некоторого нового порогового значения, при котором произойдет срабатывание ЯУ. В этом случае произойдет отключение (Л - 1)-го модуля, если он, как и jV-й модуль снабжен /?С-цепоч-кой и компаратором. При увеличении уровня стабилизации тока /„ наблюдается обратный процесс поочередного подключения модулей, находящихся в отключенном состоянии. Перевод «лишних» модулей в режим «холодного резерва» существенно повышает надежность ИВЭП. Построение ДИО на основе коммутации модулей вида ПР - ПР позволяет, во-первых, получить максимальный КПД во всем диапазоне изменения тока нагрузки, поскольку каждый работающий модуль отдает в нагрузку свою номинальную мощность, и, во-вторых, повысить надежность ДИО за счет введения дополнительного числа F резервных модулей. \Лио Рис. 1.9 Канал адаптации ДИО по надежности обеспечивает подачу сигнала управления на транзисторы резервных модулей при появлении неисправных модулей. Для этого каждый модуль должен иметь информационную точку, подача сигнала с которой соответствует исправному состоянию модуля, а отсутствие - неисправному. Причем сигнал канала адаптации ДИО по надежности должен сравниваться с сигналом канала адаптации ДИО по току нагрузки с тем, чтобы число работающих модулей было бы достаточным для обеспечения этого тока без перегрузки модулей. На рис. 1.9 показано УУ ДИО с каналами его адаптации по состоянию ПМ, по значению тока нагрузки и отклонению напряжения Д(/„. Здесь ДИО содержит основных и F резервных модулей. Сигналы, характеризующие состояние ПМ, подаются на суммирующий элемент СЭ. Общий сигнал с выхода СЭ определяет количество включенных и исправных модулей. Суммарный сигнал сравнивается в устройстве сравнения УС с сигналом ДГ, пропорциональным току нагрузки. Если он меньше этого сигнала, то появляется разностный сигнал AU, свидетельствующий о недостаточном числе включенных исправных модулей. Сигнал А и обеспечивает срабатывание порогового устройства, на его выходе возникает положительное напряжение, которое приводит к увеличению напряжения на выходе интегратора И, и АЦП вырабатывает разрешающий сигнал на дополнительное включение модулей. Включение исправного модуля сопровождается дискретным увеличением выходного напряжения СЭ, и, следовательно, уменьшением сигнала AU. Поэтому если он становится меньше порога срабатывания ПУ, то напряжение на выходе И остается постоянным по уровню, что обеспечивает постоянное число включенных исправных модулей. При уменьшении тока нагрузки сигнал AU становится отрицательным, ПУ срабатывает в другую сторону, что приводит к уменьшению числа / включенных ПМ. Пороговое устройство необходимо для обеспечения устойчивой работы канала адаптации по току нагрузки. Постоянная времени заряда интегратора может быть выбрана небольшой (несколько микросекунд), поэтому подключение .модулей при бросках тока нагрузки происходит практически мгновенно, что исключает перегрузку ранее включенных модулей. В данном УУ невключенные основные и резервные модули находятся в «холодном резерве» и не потребляют мощности по цепи управления, что значительно повышает надежность схемы и ее КПД. Устройства управления ДИО строятся на принципах цифровой вычислительной техники. 1.4. ЭЛЕМЕНТНАЯ БАЗА ИСТОЧНИКОВ ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ Удельные показатели по массе, объему и стоимости ИВЭП с бестрансформаторным входом в значительной степени определяются характеристиками применяемых в них элементов: конденсаторов сглаживающих фильтров, диодов устройств выпрямления, транзисторов, инверторов и импульсных стабилизаторов напряжения, трансформаторов и дросселей. От состояния элементной базы ИВЭП во многом зависит его схемное решение. На рис. 1.10 показана обобщенная функциональная схема ИВЭП с бестран-форматорным входом, рассчитанного на выходную мощность 10-300 Вт исходя из комплектации ее элементами с указанием примерного объема, занимаемого функциональным узлом в общем объеме ИВЭП. На схеме обозначено: СФ - по-мехоподавляющий сетевой фильтр; ВИ - выпрямитель низкочастотный; ФН - сглаживающий фильтр низкочастотный; И - инвертор; УУ - устройство управления; Т - трансформатор высокочастотный; ВВ - выпрямитель высокочастотный; ФВ - фильтр высокочастотный. На рис. 1.11, а - е приведены зависимости массы узлов от тока нагрузки для выходных напряжений ИВЭП 5, 12,27 В (кривые 1,2, 3) для выпрямителей низкочастотного (а) и высокочастотного (б), фильтров низкочастотного (в) и высокочастотного (г), регулируемого инвертора {масса транзисторов типа 2Т809А и радиатора), выполненного по мостовой схеме и работающего на частоте 20 кГц (д), трансформатора (е), работающего на такой же частоте. В зависимости от пропускаемого спектра частот помехоподавляющие фильтры СФ делятся на низкочастотные, высокочастотные, полосовые и режекторные. Например, в источниках электропитания устройств вычислительной техники применяют широкополосные фильтры низких часот. Если диапазон частот узкий и требуется большое затухание электромагнитных помех, применяют режекторные фильтры. В [1, 10] приведены типы фильтров и конденсаторов для подавления радиопомех и их основные параметры. Выпрямительные диоды для низкочастотных устройств выпрямления характеризуются следующими основными параметрами: постоянным обратным напряжением Uodp, средним прямым током /„р, импульсным прямым током /и.пр по "2- 50 Ги, 4ffG Гц 5-20 "/о ФИ 5-/5- И W-25 2-10 % Г~7П
чению которого обеспечивается режим заряда конденсатора фильтра, а также массой и объемом (типом корпуса). Расчеты показывают, что масса Gj,h диодов выпрямителя, подключаемого к однофазной сети 220, 115 В (50, 400 Гц), для выходных напряжений источника 5,12,27 В и диапазона изменения тока нагрузки 5-50 А составляет 50 г (кривая 1 на рис. 1.11, а), а при подключении выпрямителя к трехфазной сети при тех же условиях составит 80 г (кривая 2). При подключении выпрямителя к сети 115 В, 400 Гц и напряжении на выходе источника 27 В его масса начинает резко увеличиваться, начиная с тока нагрузки /„ 20 А (кривая J), что обусловлено необходимостью параллельного включения диодов. Высокочастотные выходные выпрямители в зависимости от уровня напряжения на нагрузке можно разделить на низковольтные (2-30 В) и высоковольтные 0,1-0,15 - o,ji. В,05  J-:-1 L 0 W 20 30 0 1ц, A GipH, кг 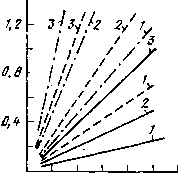 Рис. 1.11 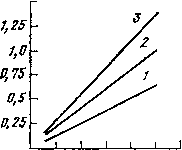 о 10 20 20 4-0 Iff, A 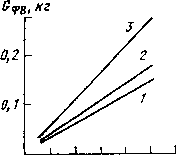
10 20 30 40 Ih,A г) 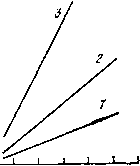 10 20 30 40 In, A 4 -Z - 10 20 50 0 50 Ph, Вт Рис. 1.12  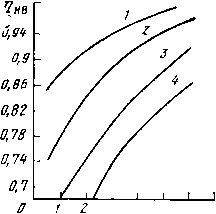 3 4 S On, В Рис. 1.13 (30-500 В), что определяет применение соответствующих диодов. Для мощных низковольтных высокочастотных диодов важным параметром служит время восстановления обратного сопротивления диода в.ос которое определяет длительность режима «сквозных» токов в схеме выпрямления. Это увеличивает коммутационные потери не только в диодах выпрямителя, но и в транзисторах инвертора. При этом элементы источника оказываются в режиме короткого замыкания, что создает условия для коммутационных выбросов на фронтах переключения, ведущих к отказу источника. Время /в.ос должно быть в 3-4 раза меньше времени выключения транзистора и соответствовать для современных высокочастотных выпрямительных диодов в.ос 0,3-0,5 мкс. Влияние времени /j, „с диода на рост потерь в транзисторах инвертора иллюстрируется зависимостью температуры перегрева корпуса 7„ер С транзистора от выходной мощности P инвертора и имеет вид, показанный на рис. 1.12, где кривая / соответствует использованию в выпрямителе диодов типа 2Д213, а кривая 2 - диодов с барьером Шотки [11]. Коммутационные потери диода, а следовательно, КПД устройства выпрямления и объем радиатора существенно зависят от частоты выпрямленного напряжения. Например, при частоте 1 - 40 кГц КПД выпрямителя равно 0,81-0,78, а при частоте 100 кГц снижается до 0,75. Причем если выпрямитель, работающий на частоте 1 кГц с выходным напряжением 5 В и током нагрузки 20 А без принудительной вентиляции, имеет теплоотво-дящий радиатор объемом в 0,06 дм", то на частоте свыше 5 кГц при тех же условиях радиатор будет иметь объем в 0,64 дм", т. е. увеличится в 10 раз. Вторым важным параметром диода низковольтных выпрямителей является прямое (гадение напряжения /„р, от значения которого зависит КПД выпрямителя. На рис. 1.13 показана зависимость КПД {Ц-) низковольтных выпрямителей от выходного напряжения ИВЭП при различных значениях U: кривая / соответствует /Уцр 0,2 В; кривая 2 t/„p 0.4 В; кривая 3 Up - 0,8 В; кривая 4 U,p I В [7]. Сравнительно меньшее значение „р получается у дилдов со структурой металл - полупроводник (диоды с барьером Шотки). У данного типа диодов Up составляет 0,4-0,6 В при токах 100 А, а время восстановления не более 0,1 мкс Недостатками диода являются большой обратный ток (74 м. для диода 2Д219) и малое допустимое обратное напряжение (20-40 В), что приводит к низкому коэффициенту запаса диодов по обратному напряжению, а значит, снижает надежность источника. В [12] показано, что КПД низковольтных выпрямителей на диодах с барьером Шотки имеет максимум при бобр ~ 50 В и применение их в выпрямителях с большим UoOp практически не дает преимущества по КПД по срав- [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] 0.0177 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||