
|
|
|
Главная страница Мультиплексирование цифровых сигналов [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] Входящие линии - & & Входящие линии Исходящие лини
& 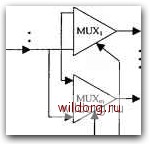 Jm . . . У1 УП-.-Ут! Уш-.-Ушп Входящие линии 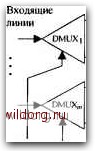 Исходящие линии & & • Исходящие . лммии У\ . -Ут в) .....Л Г) Рис. 2.13. Примеры исполнения комбинационной части -ступени Управляющая часть -ступени (иногда ее называют блоком адресной информации) предназначена для выработки адресов входа и выхода, которые должны быть скоммутиро-ваны (точнее, адресов коммутационных элементов коммутационной матрицы). Эти адреса должны заноситься в блок адресной информации и храниться в нем до окончания соединения. Поэтому управляющая часть -ступени строится на базе ЗУ (будем называть его управляющим ЗУ), в которое из управляющих устройств системы поступают сигналы управления. Объем памяти и структура управляющего ЗУ (УЗУ) определяется построением коммутационной матрицы и параметрами N к М. При реализации коммутационной матрицы на электронных ключах каждой точке коммутации необходим свой управляющий вход, и их количество будет равно произведению N х М. При реализации коммутационной матрицы на мультиплексорах/демультиплексорах число управляющих входов уменьшается, поскольку управляющие сигналы передаются в кодированном виде. И, наконец, построение коммутационной части на ПЛМ позволяет еще более сократить число управляющих входов. Управление процессом коммутации может быть организовано по принципу «управление по выходам» или «управление по входам». В первом случае в ячейки памяти УЗУ заносятся адреса исходящих цифровых линий, которые должны быть скоммутированы с конкретной входящей линией (для коммутационной матрицы, изображенной на рис. 2.11 - управление по строкам). Во втором случае в ячейки памяти УЗУ заносятся адреса входящих цифровых линий, которые должны быть скоммутированы с конкретной исходящей линией (для коммутационной матрицы, изображенной на рис. 2.11 - управление по столбцам). Цифровые КП, построенные на модулях пространственной коммутации, очень широко использовались на первых этапах создания цифровых АТС, ввиду простоты исполнения и недорогой реализации. Однако недостаток пространственного коммутатора, в котором коммутируется только один одноименный канал всех входящих и исходящих ИКМ линий (что означает блокировки при соединении разноименных каналов), привел к тому, что в настоящее время эти модули используются только в сочетании с коммутационными модулями других типов. QA. Ступень пространственно-временной коммутации Блок, или модуль (иногда его называют матрицей), реализующий пространственно-временное преобразование координат цифрового сигнала, называется S/Т-ступенью. Пусть на блок, реализующий пространственно-временную коммутацию, поступают цифровые потоки от двух ИКМ линий (для определенности примем, что по каждой линии передаются цифровые сигналы, имеющие структуру цикла ИКМ-30) (см. рис. 2.14). I I
Линия I
I I AI I Тактовая синхронизация Тактовая синхронизация Рис. 2.14. Иллюстрация принципа пространственно-временной коммутации 2 - 1368 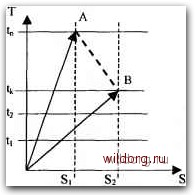 Рис. 2.15. Векторное представление пространственно-временной коммутации Все сигналы ИКМ линий синхронизированы по циклам. Согласно адресной информации, поступающей в управляющее устройство блока в 16-м канальном интервале, необходимо установить соединение абонента А с абонентом В. В адресе указано, что речевая информация от абонента А передается в /-м канальном интервале ИКМ линии 1, а абоненту В предоставлен у-й канальный интервал ИКМ линии 2. Принцип пространственно-временной коммутации канальных интервалов / иу в прямом и обратном направлениях иллюстрирует рис. 2.14. Как видно из рисунка, для передачи речевой информации из i-ro канального интервала ИКМ линии I в7-й канальный интервал ИКМ линии 2 (от абонента А к абоненту В) необходимо задержать эту информацию на время Tjj = -Zjij. В то же время сигнал, передаваемый ву-м канальном интервале линии 2, должен быть задержан на время = 1у, и передан в /-м канальном интервале следующего цикла линии I. Таким образом, передача речевой информации в прямом и обратном направлениях должна происходить в разных циклах. Векторное представление пространственно-временной коммутации показано на рис. 2.15. В данном случае преобразование Ц(8,Т) нельзя представить суммой ортогональных преобразований (Т) и (S). Структурными параметрами /Г-ступени являются число N входящих цифровых линий с С/ временными канальными интервалами каждая, а также число М исходящих цифровых линий с С2 временными канальными интервалами каждая - Х/Г; (N/C1) х (М/С2). Возможны несколько способов построения S/Г-ступеней. Наиболее часто применяются три основных: координатный способ построения; использование мультиплексоров и де-мультиплексоров; использование кольцевых соединителей. Координатный способ построения Суть метода иллюстрирует рис. 2.16. Схемы речевых ЗУ образуют условную матрицу, разделенную на строки и столбцы. Запись кодовых слов производится одновременно в речевые ЗУ вертикали (или горизонтали) матрицы, отвечающие за входящие цифровые линии. Считывание осуществляется по горизонтали (или вертикали) матрицы в ту исходящую цифровую линию, с которой необходимо осуществить коммутацию. В качестве примера реализации /Г-ступени по координатному принципу рассмотрим блок пространственно-временной коммутации цифровой ЭАТС 200 (в технической документации ступень названа блоком временной коммутации). Структурные параметры блока - S/T: (32/32)х(32/32). Структурная схема модуля представлена на рис. 2.17, где SWM - модуль коммутации; s/p, p/s - преобразователи последовательного кода в параллельный и обратно, MPTL - блок формирователя синхроимпульсов, SWCM - блок управляющего ЗУ, SWCL - блок тактирования. Преобразователи s/p, p/s кроме преобразования кодов выполняют функции соответственно модулей приема и передачи. Блок коммутации может состоять из нескольких модулей пространственно-временной коммутации SWM, которые располагаются в виде условной матрицы. При этом блок управления также будет состоять из нескольких модулей управляющих ЗУ SWCM, управляющих группой модулей SWM (как правило, условной горизонталью). [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] 0.0126 |
||||||||||||||||||||||||||||||||||||||||||||