
|
|
|
Главная страница Мультиплексирование цифровых сигналов [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [ 56 ] [57] [58] [59] [60] [61] Возвращаясь в начало параграфа, можно сказать, что на стыках АТС помимо физических и электрических характеристик необходимо аппаратурно и программно реализовать стык цифровой АТС и линий сети по сигналам и процедурам систем сигнализации этих линий. 7.2. Принципы синхронизации в цифровых АТС в общем случае (при соединении в сеть трех и более цифровых АТС) возникает проблема синхронизации цифровой сети. Под синхронизацией цифровой сети понимается процесс установления и поддержания предопределенных временных соотношений между цифровыми потоками. Различают тактовую синхронизации сети, обеспечивающую одинаковую скорость работы цифровых систем, и цикловую синхронизацию информации по группам символов, или циклам. Ниже очень коротко речь пойдет о тактовой синхронизации сети. Рассмотренные в данной книге цифровые системы коммутации относятся к классу синхронных систем. Соблюдение заданных временных и частотных соотношений между сигналами в ступенях коммутации данных станций является непременным условием их правильной работы. Проблема раздачи частоты и времени (т.е. синхронизации) внутри независимо работающей цифровой АТС не является чем-то особенно сложным. Ее решение сводится к созданию внутри цифровой АТС системы синхронизации, управляемой собственным станционным генератором (рис. 7.6). Абонентские стыки Цифровое коммутационное поле Сетевые стыки Управляющее устройство Стаициоииый генератор Рис. 7.6. Синхронизащ1Я цифровой АТС независимым станционным генератором Ничего принципиально нового не появится, если с помощью ЦСП в сеть будут соединены две цифровые АТС. В этом случае синхронизация будет осуществляться по одному из двух станционных генераторов (рис. 7.7) любой АТС. В передающей части (Пд) аппаратуры каждой ЦСП используется независимый генератор тактовой частоты Fo или F,. Именно по одному из этих генераторов может быть синхронизирована работа такой цифровой сети. Однако уже в этом случае придется учитывать эффект запаздывания прохождения сигналов по ЦСП («пролетный эффект»). Для выравнивания значащих моментов сигналов (по сути, для фазовой синхронизации) на цифровых АТС вводится буферная память (рис. 7.8). АТС1 Рис. 7.7. Синхронизация двух цифровых АТС АТС 2  Цифрован АТС Запись
Считывание Рнс. 7.8. Использование буферной памяти С помощью буферной памяти удается за счет задержки цифрового сигнала синхронизировать по времени цифровые потоки двух АТС, однако объем буферной памяти по экономическим соображениям не может быть очень велик. Если объединенные в сеть цифровые АТС не будут синхронизированы, то возникнет эффект искаженного приема цифровых потоков, названный проскальзыванием. Когда входящий цифровой поток, записываемый в буферную память, имеет скорость выше скорости синхрогенератора АТС, то часть входящих бит будет теряться (нет места для их записи). Если скорость входящего потока будет ниже скорости синхрогенератора АТС, то при считывании часть данных будет считываться дважды прежде чем придут данные из линии. Численно проскальзывания определяются числом бит (неправильно принятых или потерянных) на один канал за определенный отрезок времени. Проскальзывания по-разному сказываются на качестве передаваемой информации в зависимости от вида связи. При телефонном разговоре это будут щелчки, при передаче данных потеря или вставка бит приведет к необходимости повторения передачи данного пакета, при факсимильной связи на бумажном носителе могут появиться белые или черные полосы и т.д. Таким образом, проскальзывания могут быть приняты как мера качества передачи цифрового потока для заданного вида связи. Международный союз электросвязи в Рекомендациях G.811 и G.822 задал меру качества передачи по проскальзываниям для различных видов цифровых сетей. Было определено, что допустимо проскальзывание в один бит на один канал в течение: - 70 дней для международной цифровой сети, - 7 дней для национальной цифровой сети, - 12 часов для местной цифровой сети. 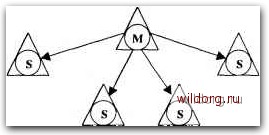 Наиболее сложным является обеспечение нормы проскальзывания для международной цифровой сети. Синхрогенератор должен иметь при этом стабильность порядка 10 " в течение 70 дней. Единственным генератором такого рода являются цезиевые атомные часы. Очевидно, что если установить на каждой цифровой АТС атомные часы, то отпадет необходимость в синхронизации цифровой сети. В этом случае каждая цифровая АТС работала бы в тезиохронном (почти синхронном) режиме. Но такое решение чрезвычайно дорого из-за высокой стоимости атомных часов. Поэтому было решено, что в плезиохронном режиме будут работать относительно друг друга две любые национальные цифровые сети. Для национальных сетей Администрация связи каждой страны должна построить свою сеть синхронизации, отдельную от сети передачи речи. Для синхронизации цифровых сетей различного назначения (от военных до сетей общего пользования) было предложено большое количество методов построения, однако общепринятым для цифровых сетей связи общего пользования стал метод «ведущий - ведомый». Суть этого метода состоит в том, что сигнал эталонной частоты передается из одного узла, названного «ведущий» (master - М), в другие, названные «ведомыми» (slaves - S) (рис. 7.9). Обычно сеть синхронизации по методу «ведомый - ведущий» строится как иерархическая сеть. Синхрогенератор узла высшей ступени иерархии обеспечивает сигналами эталонной частоты определенное чис- Рнс. 7.9. Метод синхронизации ло узлов второй ступени иерархии, каждый «ведомый - ведущий» из которых может, в свою очередь, обеспечить эталонной частотой другие узлы либо непосредственно, либо через транзитные узлы. Синхрогенераторы узлов сети, кроме высшего (эталонного), являются подстраиваемыми. Благодаря использованию высокостабильного генератора на ведущем узле (обычно це-зиевых атомных генераторов) и недорогих менее стабильных генераторов на ведомых узлах, а также использованию для передачи эталонных частот разговорных трактов, метод «ведомый - ведущий» является в настоящее время наиболее экономичным. Стабильность частоты в сети приближается к стабильности частоты ведущего узла и является достаточно высокой. Этот метод позволяет осуществлять межсетевую синхронизацию на плезиохронной основе. К недостаткам метода следует отнести возможность «потери» ведущего генератора. При этом ведомый узел либо выбирает другой источник в качестве ведущего, либо использует собственный генератор в режиме независимой работы, пока не будет восстановлена связь с ведущим генератором. Для увеличения надежности используются различные методы резервирования оборудования. в настоящее время в различных странах (в США, Японии, Швеции и др.) для синхронизации сети используется множество модификаций метода «ведомый - ведущий». [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [ 56 ] [57] [58] [59] [60] [61] 0.0245 |
||||||