
|
|
|
Главная страница Мультиплексирование цифровых сигналов [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [ 22 ] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] 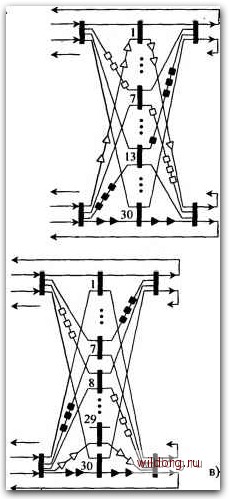 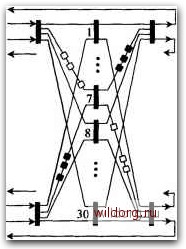 Рис. 3.24. Блок-схемы поиска пар соединительных путей Абоненты включены в одну Т-ступень Д - направление передачи А - направление приема Абоненты включены в разные Т-ступени □ - направление передачи - направление приема Техническое решение, позволяющее применить симметричный алгоритм поиска пары соединительных путей вне зависимости от места включения абонентов, состоит в следующем: 1) на Г-ступени коммутационного поля производится разделение соединительных путей, устанавливаемых между абонентами одной Г-ступени, и путей, устанавливаемых между абонентами разных Г-ступеней; 2) -ступень разбита на подматрицы, обслуживающие только один вид соединения. В результате для обоих видов соединений используется симметричный алгоритм, но соединение устанавливается через различные половины S-ступени (упрощенная схема поля показана на рис. 3.25). При рассмотрении алгоритмов установления пар соединительных путей оставался в тени способ поиска свободных промежуточных линий, соединительных путей и свободных выходов в заданном направлении КП. Отличительной особенностью поиска соединительных путей в цифровых коммутационных системах с программным управлением является отсутствие в них физического опробования линий и приборов поля. Все установленные соединения отображаются в виде специ- альных записей в ЗУ управляющих комплексов. Найденные по тому или иному алгоритму соединительные пути и приборы сравниваются с этими записями для определения того, свободны они или заняты. Исходящая Т-ступень yvnp тси о Входящая Т-ступень У>пр INTRA INTER INTRA -Чт- INTER SSU 3 32 -.. SSU 2 INTRA INTER SSU 1 INTRA -4 INTER TCU Рис 3.25. Цифровое КП с симметричным алгоритмом поиска соединительных путей (TCU/- /-тый модуль Г-ступени, 88и,-у-тая пространственная матрица (все матрицы составляют 5-ступень), INTRA - ИКМ линии для установления соединения между абонентами одной Г-ступени, INTER - ИКМ линии для установления соединения между абонентами разных Г-ступеней) При установлении соединения через цифровое КП всегда известна точка входа (управляющий комплекс системы располагает сведениями о том, по какому канальному интервалу какой входящей ИКМ линии будет передаваться речь вызывающего абонента). Эта информация передается в управляющий комплекс, например по 16-му канальному интервалу ИКМ-30. С другой стороны, анализ цифр номера вызываемого абонента дает информацию о направлении соединительных линий, в котором находится аппарат вызываемого абонента. В этом направлении находится одна или несколько ИКМ линий. В одной из них необходимо найти свободный канальный интервал (этот интервал будет помечен управляющим комплексом как принадлежащий вызываемому абоненту). Наибольшее распространение в цифровых КП получил способ поиска соединительных путей «от точки к точке». Процедура поиска сводится к следующему. На первом этапе задается начальная точка (занятый канальный интервал в данной входящей ИКМ линии). Затем отыскивается свободный канальный интервал в любой ИКМ линии требуемого направления. На следующем этапе разыскивается свободный соединительный путь между помеченным входным и найденным выходным канальными интервалами. После того как управляющий комплекс найдет этот свободный соединительный путь, устанавливается соединение. Если управляющий комплекс не находит свободного канального интервала в исходящей ИКМ линии требуемого направления или при найденном исходящем канальном интервале не находит свободного промежуточного пути, вызов считается потерянным. При сопоставлении друг с другом КП различных типов чаще всего в качестве критерия используют стоимость поля, которая определяет его экономическую эффективность. Для оценки экономической эффективности ведем функцию Т, которую назовем функцией приведенной стоимости (ФПС): где G - число видов функциональных элементов: к, - стоимостный (весовой) коэффициент соответствующего функционального элемента; Qi - число функциональных элементов поля i-ro вида. В общем случае функция Г зависит от класса структуры цифрового КП и многих других параметров: количества цифровых трактов системы и каналов в ЦСП, типа структуры КП (разделенное или неразделенное), способа передачи сигнала по каналу (параллельный или последовательный), алгоритма выбора пар соединительных путей в КП, способа поиска пути, допустимой нагрузки, потерь и т.д. Иногда удобно использовать ФПС, представляющую собой функцию удельных затрат иа один канал: где N-число каналов, обслуживаемых КП. При оценке эффективности КП с одинаковым качеством обслуживания, но различным числом цифровых трактов и каналов удобно использовать ФПС, являющуюся функцией зависимости затрат на обслуживание одного эрланга нагрузки: где Y - нагрузка, поступающая на КП. Конкретное представление функций 7] Т, или 7} зависит от выбора типов функциональных элементов и соответствующих стоимостных коэффициентов, который может быть осуществлен с различной степенью детализации. Именно выбор указанных параметров существенно влияет на сложность вычисления функций Т, Т/. Т2. С учетом вышеизложенного для оценки цифровых КП были построены таблицы выбора оптимальной структуры поля с количеством звеньев от 3 до 6, числом канальных интервалов в ЦСП 30 и 120, числом ЦСП (работающих по способу поиска соединительных путей «от точки к точке») до 120 ООО для двух типов КП - разделенных и неразделенных (с фиксированным качеством обслуживания). С помощью этих таблиц можно выбрать структуру цифрового КП с минимальным значением, например, функции Tj при фиксированном числе звеньев для заданной емкости. Результаты анализа эффективности цифровых КП можно проиллюстрировать зависимостями Т, =f (L), где L - общее число ЦСП КП. На рис. 3.26 приведены эти зависимости для случая применения ЦСП ИКМ-30 при нагрузке на один канальный интервал = 0,8 Эрл, качестве обслуживания р = 0,1%, неразделенном поле, работающем способом «от точки к точке», и использовании квазисимметричного алгоритма поиска пар соединительных путей. Как видно из графиков, приведенная стоимость поля возрастает с увеличением емкости. Скорость нарастания стоимости различна для различных типов полей, однако характерно, что КП с S-ступенью на первом и последнем звеньях являются более дорогостоящими, чем с Г-ступенями на этих звеньях. Анализ экономичности цифрового КП в зависимости от стоимостного коэффициента к показывает, что приведенная стоимость для всех КП, как правило, возрастает с увеличением к, причем особенно существенно - для трехзвенных схем. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [ 22 ] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] 0.0108 |