
|
|
|
Главная страница Метод функций Ляпунова [0] [1] [2] [3] [ 4 ] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] § 3 ФУНКЦИИ ЛЯПУНОВА 17 переходит, таким образом, в задачу устойчивости нулевого решения х = 0 системы (2.3). Сформулируем теперь определение устойчивости нулевого решения х = 0 системы (2.3). Решение х=:0 системы (2.3) называется устойчивым в смысле Ляпунова, если для любого положительного числа s можно указать положительное число 8 такое, что из неравенства 1(о)11<С следует при ft неравенство х(0<С- Если же, кроме того, всякое решение x(t), начальные данные которого определяются условием х(о) <, обладает свойством Иш х(0=0. то нулевое решение / сю называется асимптотически устойчивым в смысле Ляпунова. Аналогично вводятся понятия равномерной асимптотической устойчивости и устойчивости в целом. § 3. Функции Ляпунова Рассмотрим функцию v (Xi, ..., х„), определенную в фазовом пространстве переменных Xi, ..., х„, непрерывную в некоторой области Д включающей в себя начало координат. Предположим также, что функция v (Xi, ..., х„) обладает в области D непрерывными частными производными. Функцию v(Xi..... х„) назовем определенно положительной в области D, если всюду в области D, кроме точки О (О, ..., 0), имеет место неравенство г» 0. Если же выполняется неравенство v<0, то функция v называется определенно отрицательной. В том и другом случае функция может называться также знакоопределенной. Если в области D имеет место всюду неравенство или неравенство fsgO, то функция v называется знакопостоянной, причем в первом случае функция v может быть также названа знакоположительной, а во втором - знако-отрицательной. Если функция V принимает в области D значения как положительного знака, так и отрицательного, то в этом случае V называют знакопеременной функцией. Например, функция v = x\-\-xl - Хз будет знакопеременной функцией в пространстве переменных Xi, Xj, Хз, а функция t» = Xj-J--- Xj + Хз - определенно положительной в этом пространстве. Функция t» = Xj--X2 будет, однако, знакопосюянной в пространстве переменных Xj, Xj, Xj (так как она обращается в нуль на оси Охз) и знакоопределенной в пространстве переменных X,, Xj. Чаще всего мы будем иметь дело только с квадратичными формами переменных х„ ..., х„. Очевидно, любую квадратичную форму можно записать в виде S a-ikXiXk, где а.-Аа*.. Составим матрицу коэффициентов этой формы: и рассмотрим определители а,! ... а, й*1 • • • й** . k=\, 2, п. Если имеют место неравенства О при k-\, 2, ..., я, то форма V будет определенно положительной. Справедлива и обратная теорема, т. е. условия ДО, называемые критерием Сильвестра [5], являются необходи-MHiMH и достаточными для определенной положительности формы V. Из критерия Сильвестра легко выводится необходимое и достаточное условие определенной отрицательности формы V. Это условие записывается в виде неравенств Д,<0, Д.>0, Дз<0..... т. е. определители Д должны последовательно чередовать знак, причем знак Д] должен быть отрицательным. В дальнейщем мы будем изучать поведение функции V (Xi, ..., х„) вдоль траекторий изучаемой системы дифференциальных уравнений, и на основании этого изучения будем делать вывод о поведении траекторий рассматриваемой системы. Функции V (Xi, ..., х„), имеющие указанное сейчас назначение, принято теперь называть функциями Ляпунова. Сформулируем теорему о структуре поверхности уровня знакоопределенной функции Ляпунова. Теорема 3.1. Если функция v{Xi, дг„) знакооп-ределенна, то существует такое положительное число h, что все поверхности уровня v = с, где \ c\<h, являются замкнутыми относительно точки О поверхностями. Заметим, что мы называем поверхность v = c замкнутой относительно точки О, если на любой непрерывной линии, соединяющей точку О с точкой границы области D, имеется по крайней мере одна точка, в которой v - c. 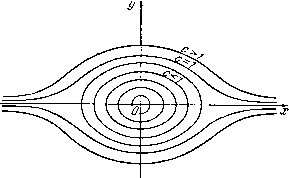 Рис. 1. Для доказательства теоремы предположим для определенности и рассмотрим шар Jj с центром в начале координат и радиусом, равным R. Предположим, что функция v определена на этом шаре (включая его границу S/). Таким образом, в качестве области D мы возьмем шар Jj = 7дJ Sj. Так как функция v непрерывна, то на замкнутом ограниченном множестве S[p границе шара, эта функция достигает своего минимального значения, которое обозначим через ft. Соединим теперь точку О с какой-либо точкой р, лежащей на границе некоторой непрерывной линией x = x{s). Так как в точке О функция v равна нулю, а v(p)h, и так как функция v меняется непрерывно вдоль непрерывной кривой x = x{s), то функция V необходимо в некоторой точке этой кривой примет значение v = c. Таким образом, внутри шара лежит замкнутая часть поверхности v = c; не исключается возможность, что другие части этой поверхности расположены за предела!йи этого [0] [1] [2] [3] [ 4 ] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] 0.0141 |