
|
|
|
Главная страница Метод функций Ляпунова [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [ 44 ] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] ТО все точки поверхности 5 будут завершать свое движение к началу координат вдоль прямой (11.15). Если наряду с (11.16) выполнено неравенство fi - 4А<0, то «второе скольжение» не будет иметь места. В этом случае изображающая точка, попав, например, на часть 5з, доходит до линии 0Q. Если К - достаточно большая величина, то линия OQi целиком далее переходит в линию OQj, лежащую как угодно близко к линии OQ4. В самом деле, след плоскости Dy-{-z = Q на плоскости 7 = 0 лежит в этом случае вне сектора, образованного следами плоскостей = 0, = 0. В области 7, 0, >• О, х О действует неустойчивая система, так как а=- 1. Величина 7 вдоль траектории движения не меняет знак. Поэтому при К достаточно большом переход точки М с линии OQ, на линию 0Q, можно считать совершающимся по некоторой прямой. Попав на линию OQi, изображающая точка М будет скользить по части до тех пор, пока не дойдет до сектора прошиваемости L\OLi. Попав на линию OZ-i, изображающая точка сойдет с поверхности 5 и через малый промежуток времени (сравнить с § 7) снова попадет на поверхность 5, но уже на часть S. Заметим, что если бы проекция точки М на плоскости (x, v) двигалась в силу системы (11.7), то за время она попала бы на линию D\X y = Q (с точностью до малых «(Л" )). Этот факт подсказывает следующую интерпретацию движения по поверхности 5: поверхность /? = 0 непрерывна, R - Ri{x,y,z) и знак А меняется не на плоскости 7=0, а на плоскости 7 = DiX-}-y = 0. Если пренебречь в этом случае ошибкой одинакового порядка с АГ, то движение точки по поверхности 5 можно описать системой х=у, р= - By - а,Лх, а, = sign X (j;--DjX). (11.17) Производная по времени функции v= Ах-\-у, взятая в силу системы (11.17), имеет вид г>= -2вУ + 2А(1 -ац)ху = - 2ву при (DiX--;;)xO, - 2Ву-4А\ху\ при (D,x + y)x<0. Следовательно, функция v{x,y) удовлетворяет условиям теоремы 12.2 первой главы, из которой следует асимптотическая устойчивость в целом нулевого решения системы (11.17). Впрочем, справедливость нашей теоремы в данном случае вытекает из непосредственного качественного исследования поведения траекторий на поверхности 5. Заметим, ЧТО в этом случае изображающая точка движется к точке О по спиралевидной кривой, отклоняющейся незначительно ОТ 5 в секторах LiOL, LOL. Заметим, наконец, что доказанную теорему можно было бы трактовать как теорему об асимптотической устойчивости нулевого положения равновесия. Ради математической строгости л- 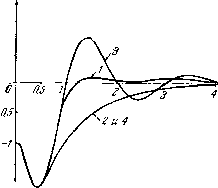 S t(ce/() Рис. 17. можно было бы в этом случае показать, что для любого еО можно указать число 8 такое, что из Хо--j(/o--2„"<8 следовало бы при О x{t) +У(0 + {1) е, где х {t\ y{t), z{t) - решение системы (П.2), определяемое начальными условиями X (0) = х„, у (0) = у„, Z (0) = Zq. Однако доказательство этого факта мы опускаем, заметим только, что это доказательство можно было бы провести точно так же, как это сделано в § 8 второй главы. На рис. 17 приводятся графики переходных процессов, полученные на модели МН-14, при следующих значениях параметров: а = 0, ft-O, с=1, К=\00. Кривая (1) соответствует значениям параметров А=12, В = 2, D= 2,34. Очевидно, в эгом случае выполняются оба неравенства (11.6). Кривая (2) соответствует случаю, когда выполняются нера- венства (ИЛЗ) и (11.14); здесь принято А=10, В=10, D = 5. Кривая (4) совпадает с кривой (2), так как она получена при Л =10, В =10, D=20. Изменение D обеспечило в этом случае выполнение неравенств (11.13) и (11 16), однако не отразилось на протекании переходного процесса, что вполне соответствует выводам, приведенным выше, так как в обоих рассмотренных случаях движение завершается вдоль прямой (11.15). Наконец, кривая (3) соответствует значениям Л=10, В=2, D=10. В этом случае выполнены неравенства В - - 4Л<0 и (11.16), следовательно, скольжение второго порядка отсутствует. Таким образом, только переходный процесс, изображенный кривой (1), соответствует процессу с наличием скольжения второго порядка. Из сравнения указанных кривых следует вывод о значительных преимуществах систем переменной структуры с форсированным скользящим режимом. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [ 44 ] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] 0.0088 |