
|
|
|
Главная страница Метод функций Ляпунова [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [ 42 ] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] Пусть для определенности yj 0. Величина ад (yj, ... • ••.Ул-2) постоянна и поэтому имеет определенный знак или равна нулю. Пусть aiyl, ул2)0. Из соотноще-ний (10.2) следует, что в этом случае о(у1, .,yn-i) = Таким образом, имеем ojO в области з] 0 и в области аО, ajO. Следовательно, в этих областях действует система dx - У- (10.17) В области at<0 и в области а, <0, a,j<0 действует система rfx dx ~У- Таким образом, линия переключения системы (10.4) является ломаной ABCEF (рис. 15). Если 03(3,5, ..., 2)< О, то линией переключения будет ломаная ABDEF. На рис. 15 показан вид интегральной кривой системы (10.14) в случае аз > О, > О, <0. Точка М, двигаясь по параболе в силу системы (10.16), попадает на прямую CF и скользит по ней до точки С. Из точки С движение далее происходит по параболе в силу системы (10.17) до точки j-, лежащей на прямой 02=0. В точке Pi происходит переключение и в дальнейшем движение происходит по предельному циклу РуРСР- Мы описали сейчас быстрое движение системы. Диаметр рассматриваемого предельного цикла, очевидно, является величиной одинакового порядка малости с v. Кроме того, с (медленным) убыванием величин yj, ул-2 вдоль траек- 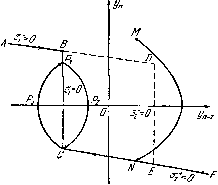 Рис. 15. тории диаметр предельного цикла также убывает. Отсюда следуег, что если система (10.9), описывающая скольжение второго порядка, устойчива, то будет уст ойчивой и система (10.1). § 11. Пример системы третьего порядка с форсированным скользящим режимом 1. Рассмотрим уравнение третьего порядка х-[-ах -[-Ьхсх= - (1.Кх, (11.1) эквивалентное системе х=у, y = z, i = - сх-by - az - пКх. (11.2) Пусть параметры а, Ь, с, К будут произвольными постоянными, причем коэффициент К положителен. Величину а определим по формуле а = sign [хА sign х{у Dx) By z\x, (11.3) где А, В, D - положительные постоянные. Таким образом, величина а можег изменить знак на одной из плоскостей: х = 0, 7(х, y)=y-[-Dx = 0, R, (X, у, z) = Ax-Byz = 0, Ri{x,y,z)=-Ax + By + z = 0. (11.4) Поверхность переключения составлена из плоскости x = Q, поверхности S, когорая состоит из частей i, S-i плоскости ==0, час гей S, и плоскости Я2 = 0, и частей 7, и плоскости Т (х, у)= у -\- Dx=Q (рис. 16). Точки поверхности 5, для которых y-[~Dx90, удовлетворяют, очевидно, уравнению R (X, у, Z) = Ах sign x(y-{-Dx)-{-Byz = 0. (11.5) Поверхность 5 и плоскость х = 0 делят фазовое пространство на четыре области. О,, О, О», Q4, определяемые соответственно неравенствами область О,: х>0, R>0 область О: х<0, RQ, область Q3: х<0, R<0, область Gi,: хО, R<0. 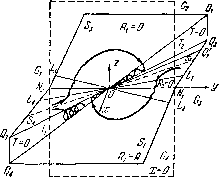 Очевидно, имеем !х= 1 в областях Gi и О3 и а = -1 в областях Ga и G4. На поверхности 5 вблизи прямой NiON по которой пересекаются плоскости /?i = 0, кч = 0 и х - 0, выделяются секторы LjOLi и LgOLj, в которых траектории системы (11-2) «прошивают» поверхность 5. Можно показать, что путем выбора достаточно большого К углы этих секторов можно сделать как угодно малыми. Во всех остальных точках поверхность б является поверхностью скольжения. Плоскость х==0 является «прошиваемой» плоскостью. 2. Теорема 11.1. Если параметры А, В, D положительны и ККф где /Со - достаточно большое число, то все решения системы 2) обладают свойством lim X (О = Ит у {t) = lim Z (t) = 0. /-*оо /=со t~*-oo Наибольший интерес представляет поведение траекторий в случае, когда выполнены неравенства 5 4Л<0, D<0,5 (5 + "Кв + 4Л). (11.6) Этот случай, являющийся наиболее трудным, мы и рассмотрим подробно в дальнейшем. Типичное поведение траектории при выполнении неравенств (11.6) описывается следующим образом. Произвольная точка фазового пространства либо попадает через конечный промежуток времени на поверхность 6, либо за бесконечный промежуток времени непосредственно в начало координат. Если точка М попадет на части 5i или 5з поверхности 5, то в дальнейшем она будет двигаться в силу системы х=у, р=~Ах - Ву (11.7) по спиралевидной кривой, пока не дойдет до плоскости Т==0. Пройдя плоскость 7" = О, точка ТИ должна попасть, например. Рис. 16. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [ 42 ] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] 0.0116 |